3.2 工况介绍
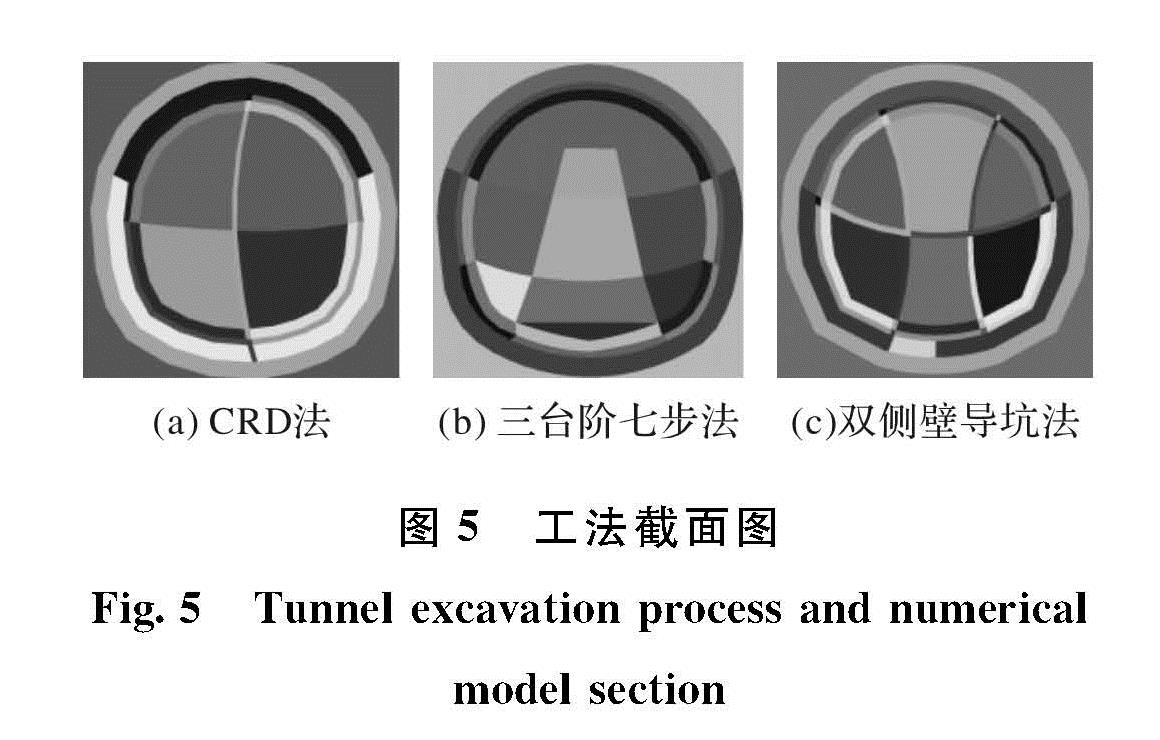
西安地铁四号线火车站项目采用CRD工法开挖,为推广机器人在不同工法中的应用,本文另选择了其他两种采用临时仰拱的工法:三台阶七步法[12]和双侧壁导坑法[13],分析在不同工法下应用机器人时临时仰拱的安全性.
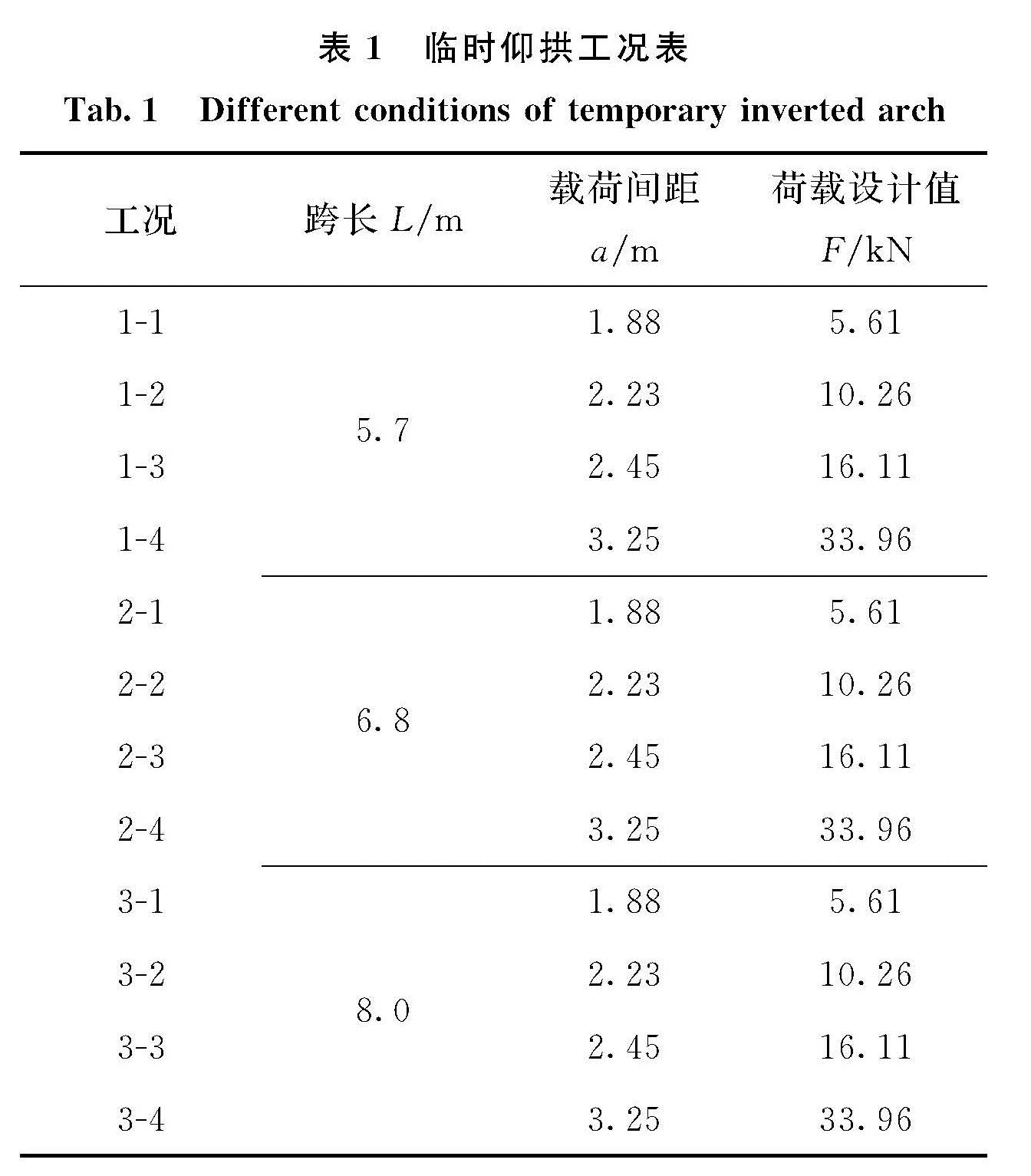
西安地铁四号线火车站工程采用的是瑞典布鲁克公司生产的型号为160的挖掘机器人,将该型号机器人荷载作为本文的基本荷载1.随着机器人开挖能力的增加,与之相应的是机器人荷载的增大.若为进一步加快开挖速度,临时仰拱必须承担更大的荷载.本文在布鲁克公司目前所生产的机器人型号中,选取了其他3种型号机器人,作为基本荷载2、3和4.在荷载取值时,考虑机器人挖掘臂向上铲土时对临时仰拱产生的反作用力,同时由于机器人行走而产生的振动荷载,根据规范,对机器人自重荷载(静荷载)乘以1.1倍放大系数.临时仰拱在不同荷载与工法(体现为跨度)下的工况见表1.
表1 临时仰拱工况表
Tab.1 Different conditions of temporary inverted arch
3.3 结果分析与讨论
工字梁的计算结果见图6与图7.
分析结果表明,在工况2-4和3-4时,梁的安全系数小于1,结构发生失效,其余工况梁的安全储备满足要求.分析图6结果可发现:跨度对于使用机器人开挖时施工的安全性具有重要影响.忽略工字梁已失效的工况,由图7,工字梁最大挠度为45.39 mm。
根据规范要求,工作平台梁的变形容许值[VT]不允许超过L/400,则工况1-X、2-X、3-X挠度变形允许值分别为:14.25 mm、17.00 mm、20.00 mm。 考虑到隧道开挖过程中,临时仰拱作为临时支护结构,按规定会及时拆除,则挠度值可突破变形许可,但突破值不宜过大.因为临时仰拱作为隧道施工的一种辅助措施,过大的挠度值会破坏其与初衬、中隔撑组成的稳定受力结构,对封闭的支护结构产生向洞室的内拉作用,造成支护结构既抵抗围岩压力,又承担自身内部的拉力,极大地降低支护抵抗围岩下沉和水平收敛的能力.若临时仰拱兼做弃渣运输通道,过大变形既不利于机器人的挖掘施工,也对土石方的运输造成困难.因此,由图6与图7,跨度与机器人荷载都对临时仰拱安全性造成极大影响,若二者之一达到相当量值,则须采取必要措施,如增大工字钢截面、提高钢材强度等级等.
图6 工字梁安全系数
Fig.6 Safety factor of I-beam
图7 工字梁不同工况下最大挠度
Fig.7 Maximum deflection of I-beam under different conditions
同时,在荷载作用下,工字梁的上翼缘受压,根据钢结构稳定性要求,上翼缘存在发生失稳的可能.但在实际施工中,工字梁安装就位后,会立刻喷射混凝土,整个工字梁实际处在混凝土板包裹中,这相当于在工字梁的上翼缘增加了无数的侧向支撑,工字梁在平面内、平面外均不会发生失稳现象.设计时对梁的失稳要求可不予考虑,一定程度简化了计算过程.
表2是混凝土板的计算结果.临时仰拱的混凝土板属单向板,机器人荷载沿短边传递给工字梁.经分析,跨度对混凝土板的安全与变形不起控制作用.为简化计算,对混凝土板只进行荷载下的挠度及安全系数计算.
表2 混凝土板安全系数及最大挠度
Tab.2 Safety factor and maximum deflection of concret slab
结果表明,荷载对混凝土楼板的承载能力起控制作用.当机器人设计荷载达到33.96 kN时,混凝土板失效.所以,若工程中为加快开挖速度而引进大荷载机器人,必须将混凝土板的稳定性作为安全考虑之一.同时,由于板跨方向的支承为刚性连接(实际介于刚接与铰接之间),根据结构力学原理可知,混凝土板上部会产生负弯矩.经计算,四种工况下的上部弯矩均略小于底部弯矩最大值.施工中可采取在支承上部即工字梁上翼缘与下翼缘均点焊钢筋的措施,可增加混凝土板的安全性.或者可在混凝土板上采取铺设临时钢板的措施,增加板的受弯承载性能[14].同时,铺设的钢板可循环利用,既体现绿色施工,又具有极大经济性.
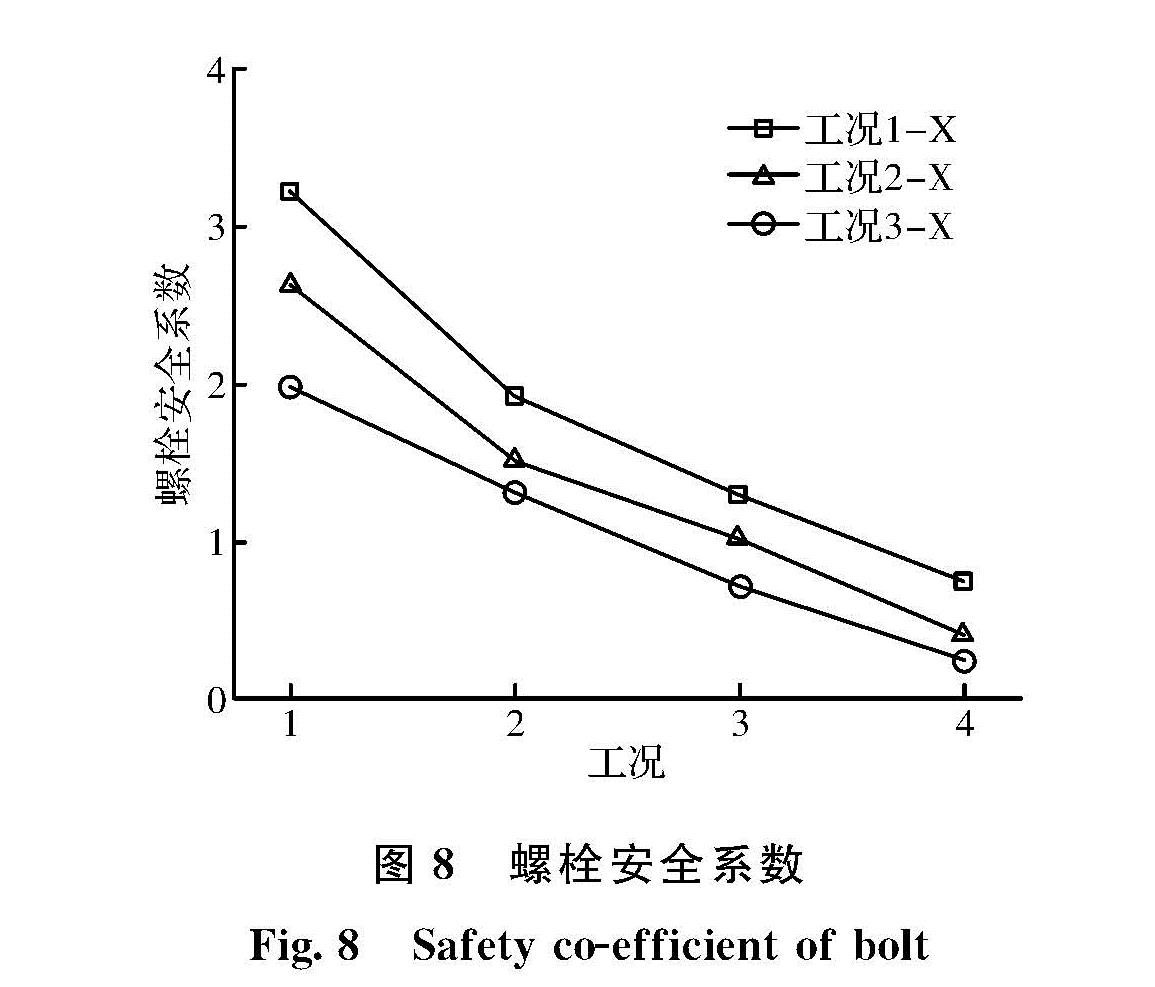
工字梁的承载能力是否能达到设计目标,必须对接头螺栓进行验算.因为使结构计算偏于安全,对工字梁采用了如图2(a)的计算简图,此时,固端弯矩为0,与实际情况不符.根据要求,为保证接头的安全性,对螺栓进行验算时采取工字梁两端固定,并对计算弯矩值采取0.85的系数折减.本工程中梁与初衬或中隔撑接头处采用2×2个M22螺栓连接,计算结果如图8所示.
图8 螺栓安全系数
Fig.8 Safety co-efficient of bolt
由
图8,临时仰拱的长度和机器人荷载均对接头螺栓的安全性起控制作用.在工况1-1至工况1-4中,临时仰拱的长度保持不变,机器人荷载逐渐增加,当达到工况1-4时,螺栓安全系数为0.76,由接头处螺栓失效开始,整个结构会迅速垮塌,工程安全与经济会造成极大影响.若荷载不变,跨度增加,则由机器人荷载引起的接头弯矩不断增大,则螺栓的安全系数不断降低.以工况1-3、2-3、3-3为例,荷载设计值为16.11 kN,跨度分别为5.7 m、6.8 m、8.0 m,而螺栓的安全系数由1.30减小为1.02、0.73.可以发现,在工况3-3,临时仰拱跨度为8.0m时,安全系数小于1.0,结构失效.因此,就临时仰拱的安全性而言,无论是其跨度的增加或是荷载的增加,都有必要对接头处螺栓进行强度校核.若安全系数达不到要求,必须对螺栓的尺寸及布置重新予以设计来保证整体结构的安全性.