收稿日期:2019-08-01 修改稿日期:2020-03-25
基金项目:国家自然科学基金项(51378170)
第一作者:郭 佳(1994-),女,硕士生,主要从事工程结构抗震.E-mail:1191417804@qq.com
基金项目:国家自然科学基金项(51378170)
第一作者:郭 佳(1994-),女,硕士生,主要从事工程结构抗震.E-mail:1191417804@qq.com
DOI: 10.15986/j.1006-7930.2020.02.016
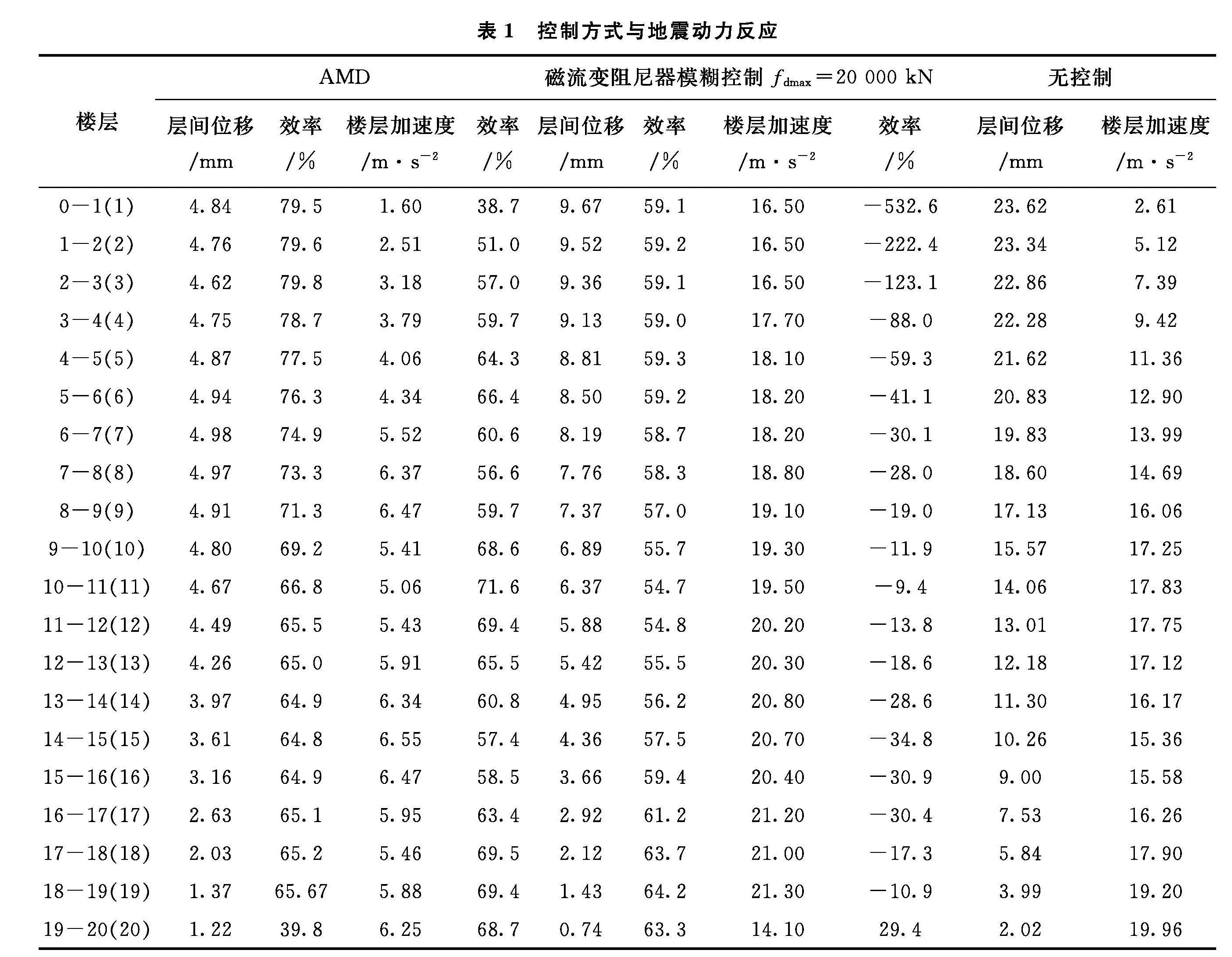
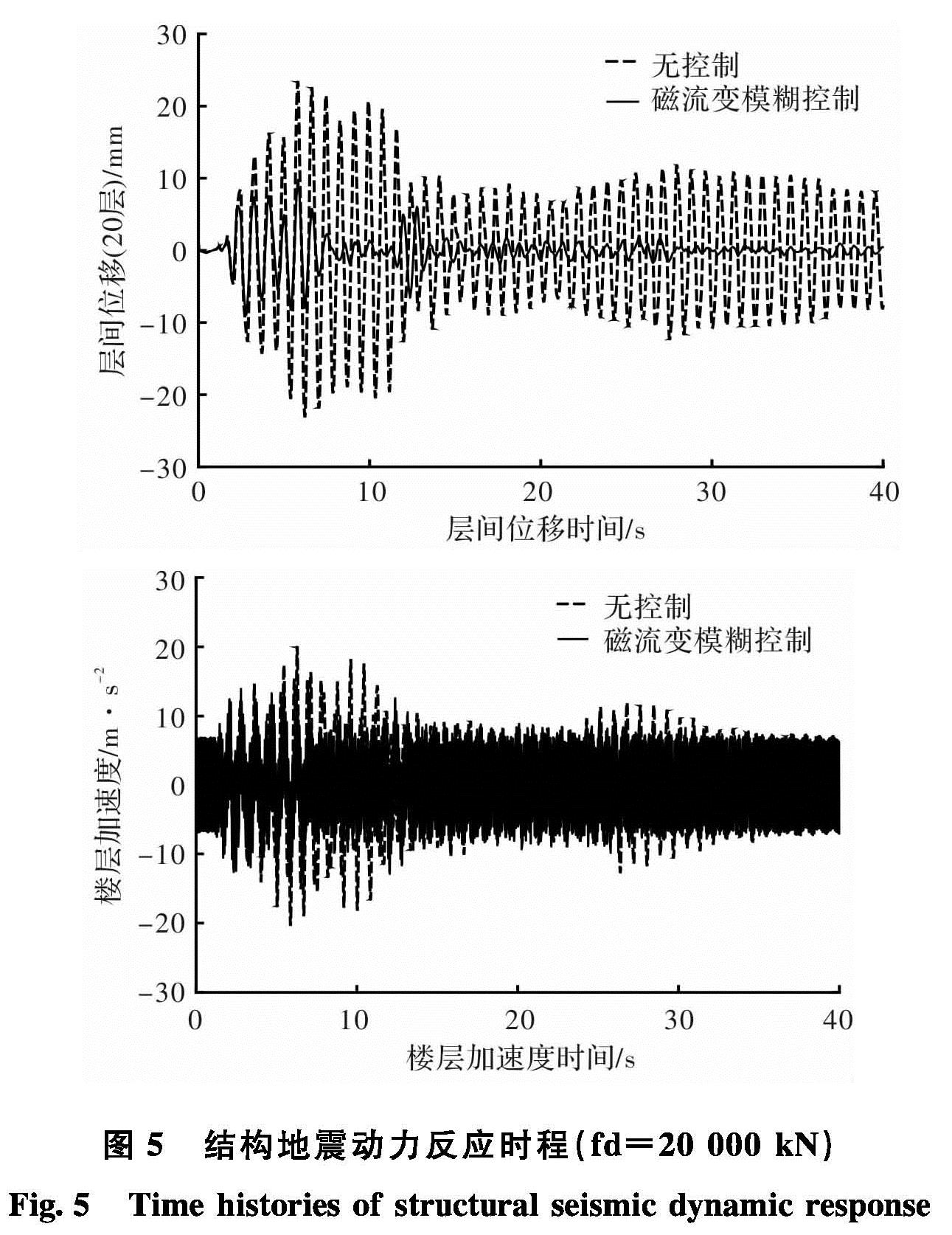
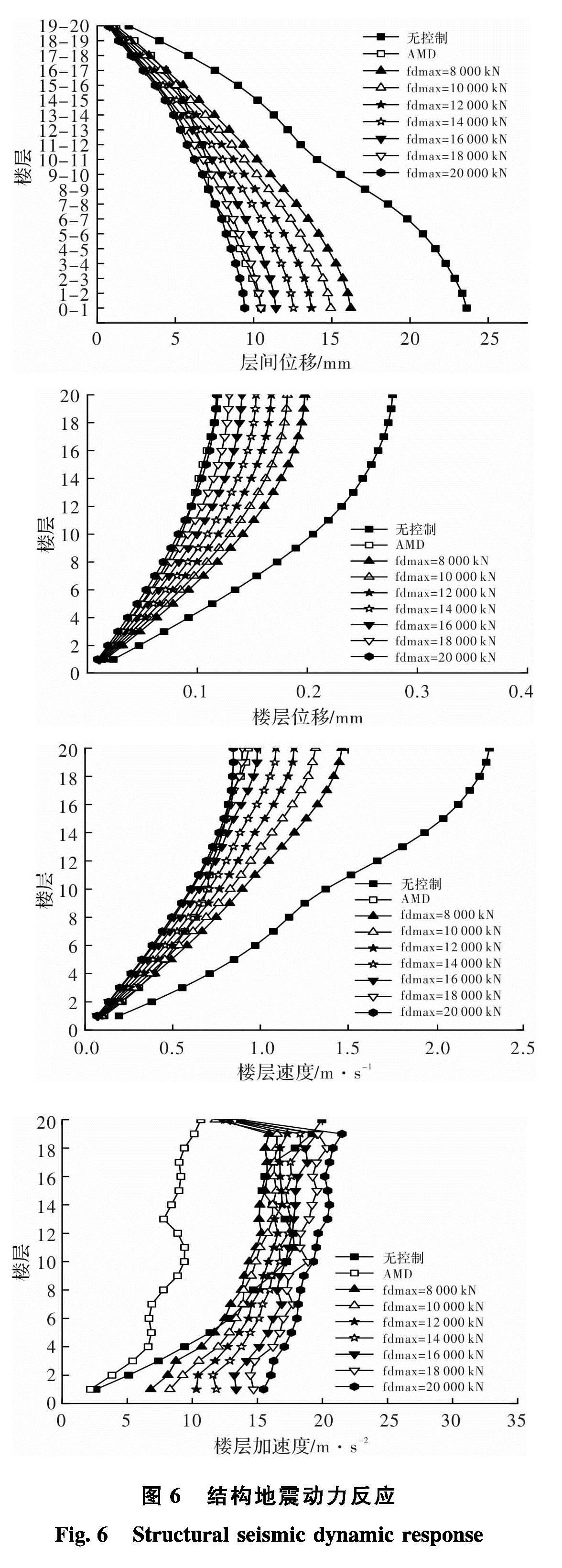
提出了磁流变阻尼器模态模糊控制算法,可以改进磁流变阻尼器半主动控制现有的算法,同时使所需要的模糊推理数量处于可接受范围之内.建立了一栋20层磁流变阻尼器半主动模态模糊控制的分析模型,并利用Matlab语言编制了求解软件.计算结果表明:所提出的算法对层间位移、楼层位移和楼层速度的减震效果较为显著,只对第一阶振型控制就可收到明显的效果.磁流变阻尼器的参数指标fdmax越大,层间位移、楼层位移和楼层速度的最大值的减震效率越高,且沿楼层高度分布均匀可达60%左右.但fdmax增大时,楼层加速度的最大值随之增大,因此对加速度减震有要求的结构不宜采用此算法.
Fuzzy mode control algorithm for structural vibration mitigation with magnetorheological damper was suggested to improve present algorithm and to reduce amount of fuzzy reasoning during control process. A 20-layer active vibration fuzzy control structural model was presented and solved with software prepared with Matlab language. Results show that fuzzy control algorithm for magnetorheological damper has relatively notable seismic mitigation efficiency for story drift, storey displacement and storey velocity. It is shown that satisfied efficiency could be expected by applying control action only upon the 1st mode.The larger the parameter index fdmaxof the magnetorheological damper is, the more notable the seismic mitigation efficiency,and the damping efficiency is as high as about 60%. Since torey acceleration might be amplified, fuzzy mode control algorithm for magnetorheological dampers are not recommended for application on buildings with necessity of acceleration mitigation.