3.1 遗传算法优化分析
为了研究变阻尼式TMD的阻尼系数c*、频率比f和限制位移D(相对于主系统的最大位移值)等参数对受控系统的动力响应的影响规律,并寻找最优值,以获取对受控系统的最佳控制效果.采用遗传算法,选取受控系统的最大位移作为优化目标函数,即:
J=max(x)(15)
其中,J为目标函数值,x为地震作用下主系统的位移响应.
本文的目标函数可定义适应度函数为
minf,ξ,D J(f,c*,D)(16)
s.t.:c*min≤c*≤c*max
fmin≤f≤fmax
Dmin≤D≤Dmax
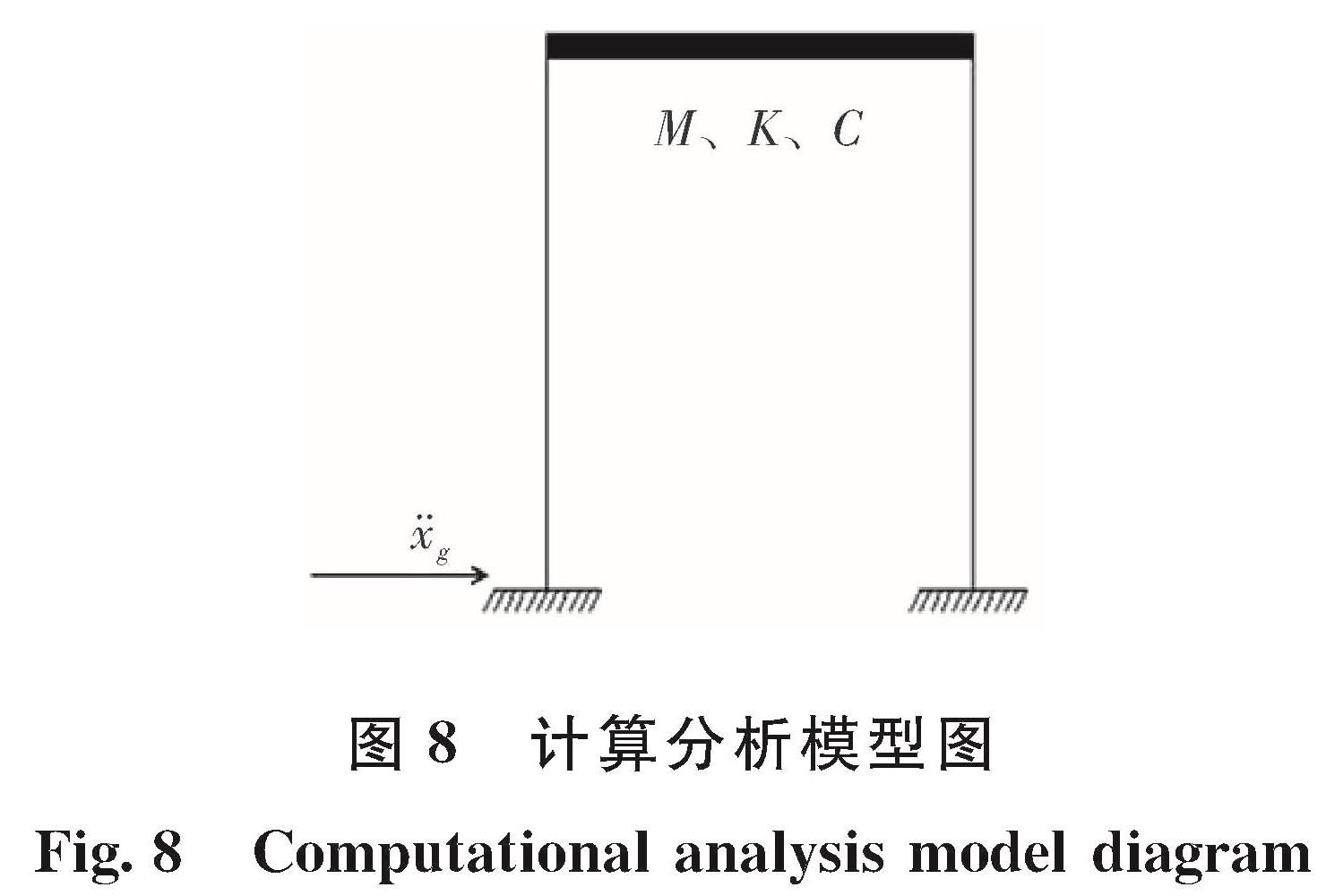
取单自由度主系统的参数为:单位质量,周期2.6 s,阻尼比0.05,分析模型如图8所示.
图8 计算分析模型图
Fig.8 Computational analysis model diagram
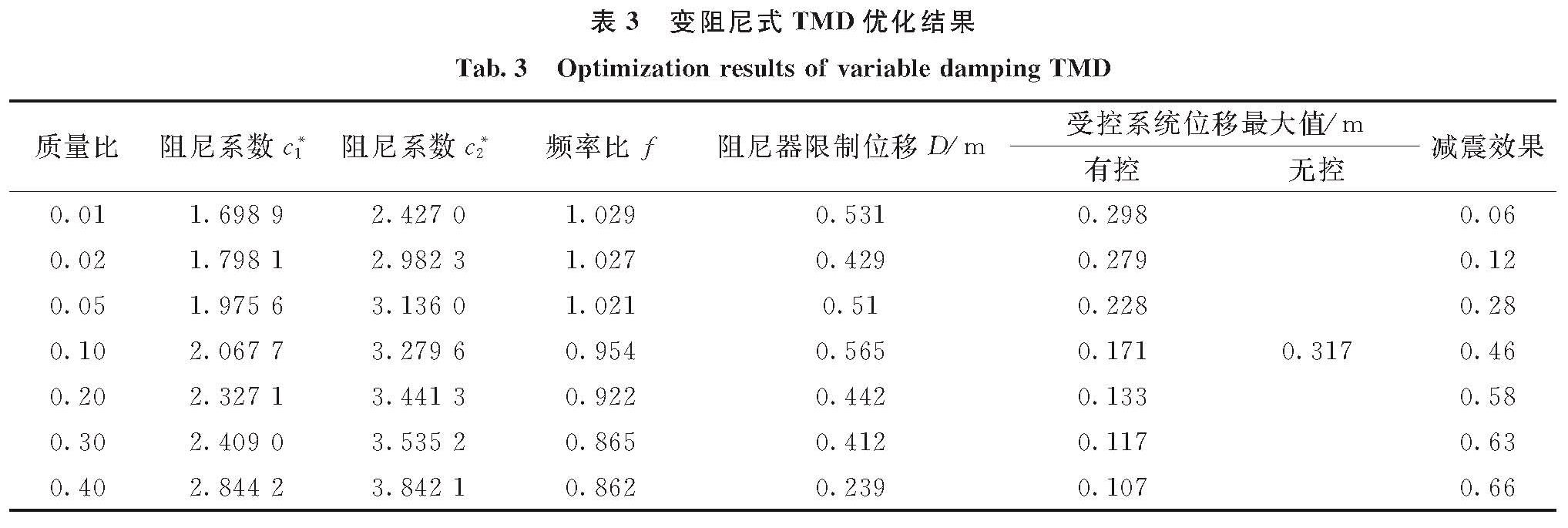
参考Den Hartog[11]给出的单自由度结构TMD最优频率比和阻尼表达式,取频率比的下限值fmin和上限值fmax分别为0.1和1.2,阻尼系数的下限值c*min和上限值c*max分别为0和4; 限制位移的下限值Dmin和上限值Dmax分别为0 m和1.0 m; 质量比μ分别为0.01、0.02、0.05、0.1、0.2、0.3、0.4.地震动输入采用加速度峰值为0.4 g的El-Centro波,时长为54 s.用遗传算法进行计算时,初始种群取为40个,遗传代数为200代,交叉概率为0.8,变异概率为0.05.同时引入传统TMD,并作对比分析,计算结果分别如表3和4所示.
表3 变阻尼式TMD优化结果
Tab.3 Optimization results of variable damping TMD
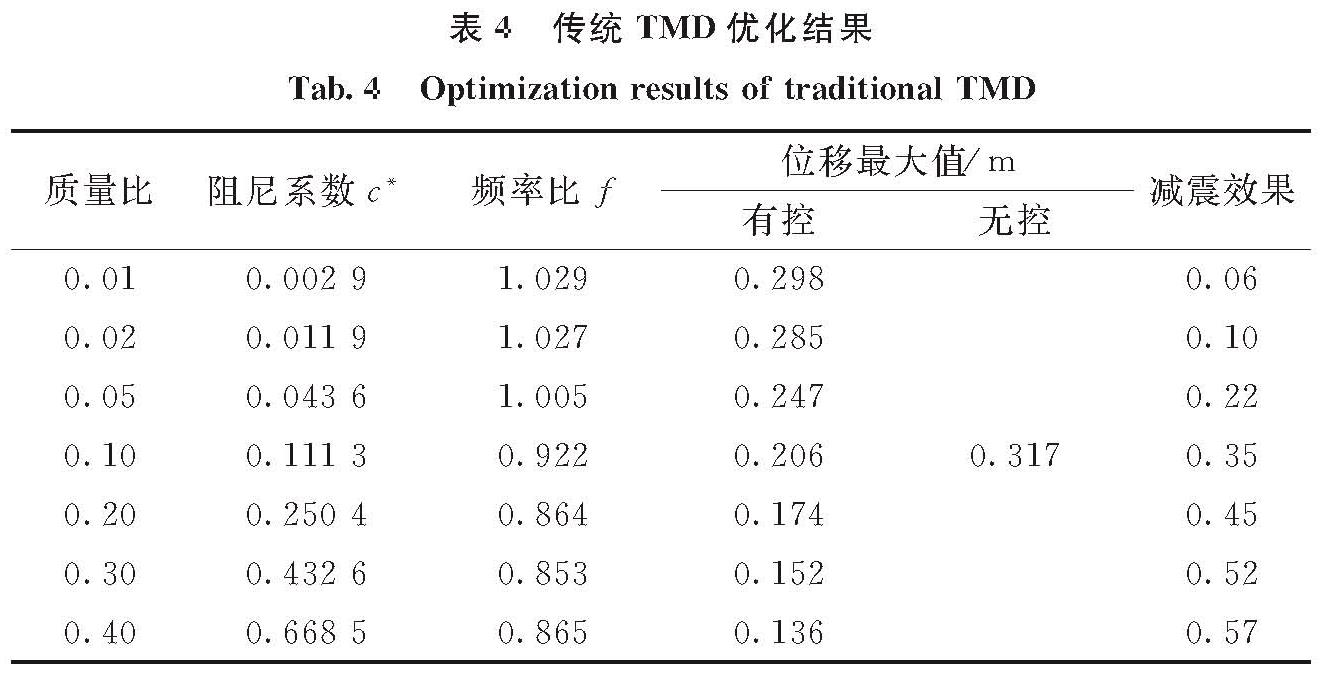
表4 传统TMD优化结果
Tab.4 Optimization results of traditional TMD
3.2 参数优化结果及分析
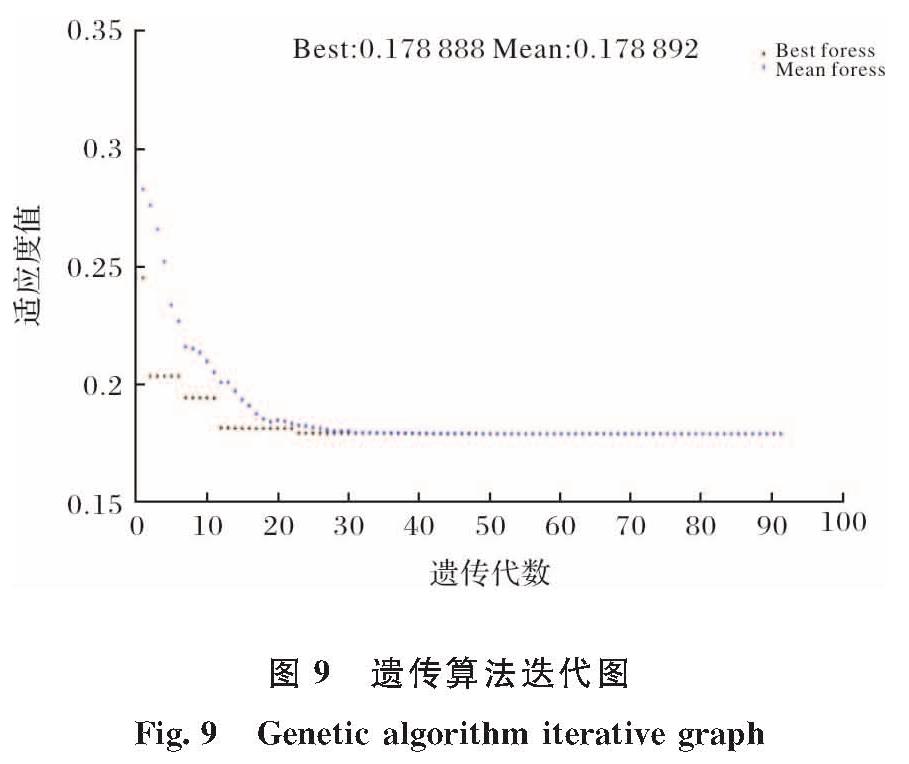
图9是最优个体收敛进程图,由图中可以看出,该算法能够在较短的进程内趋近于最优值,能够从侧面反映出算法的稳定性和收敛性较好.从表3和表4可以看出,变阻尼式TMD和传统TMD的优化结果同质量比的影响较大,随着质量比的增加,最优减震效果显著增强,且变阻尼式TMD的减震效果高于传统TMD; 同时两者的最优频率比均呈现逐渐减小趋势,但变化范围均处于1附近,两种TMD的阻尼系数均随着质量比的增大呈现逐渐增大的趋势,同时,变阻尼式TMD的最优阻尼系数c*1均小于最优阻尼系数c*2.
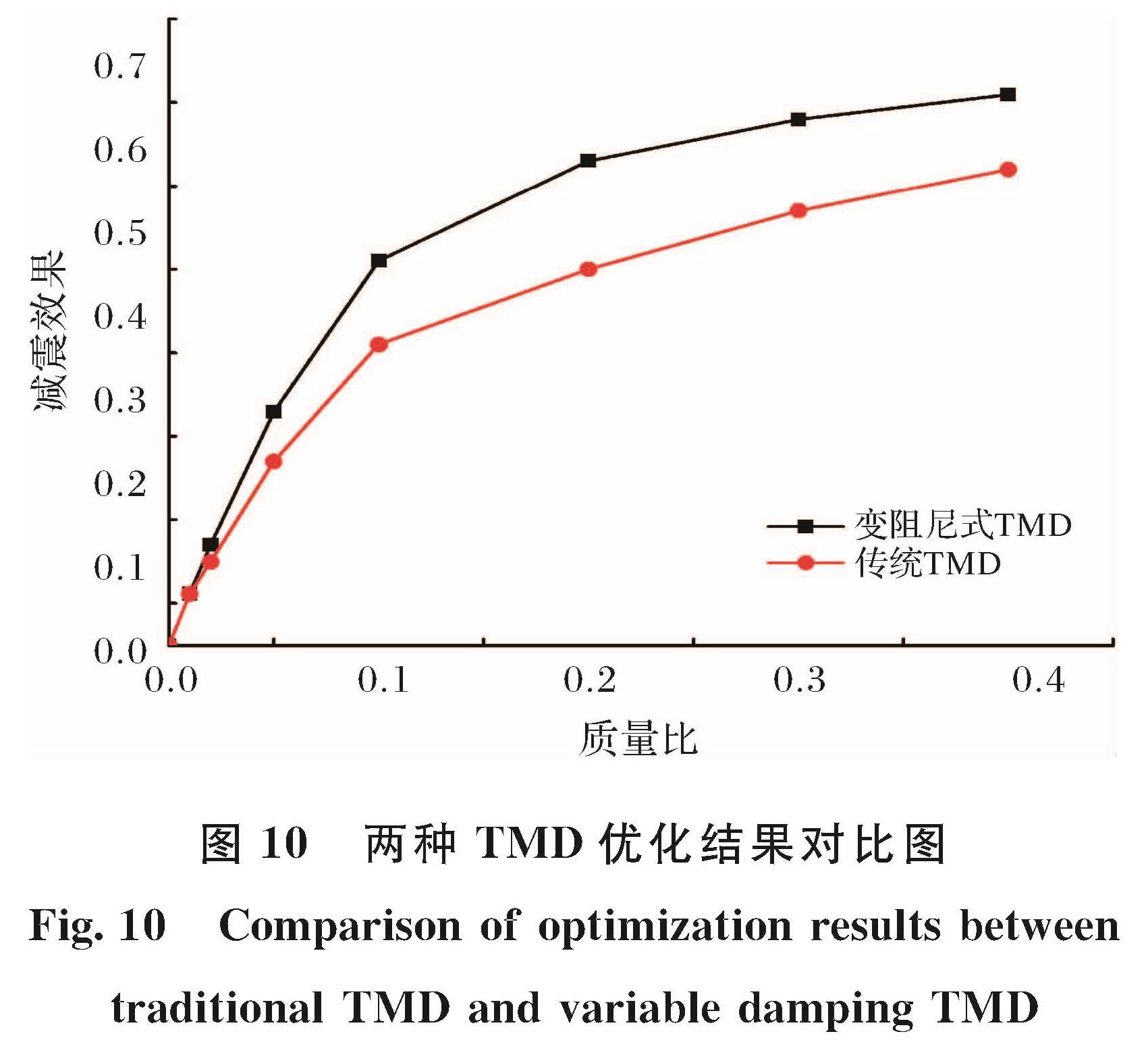
图 10为不同质量比下,变阻尼式TMD与传统TMD对受控系统的最优减震效果的对比图.由图中可知,随着质量比的增加,两种型式TMD减震效果逐渐增强,当质量比较小时,两种型式TMD的减震效果比较接近,且均较小,由表3和表4可知,当质量比为0.01时,两种型式TMD减震效果均仅有6%; 随着质量比的增加,变阻尼式TMD的减震优势则逐渐凸显出来,较传统TMD而言,变阻尼式TMD的减震效果可提高15%左右; 随着质量比的增加,最优减震效果增长的趋势逐渐降低,虽然质量比越大减震效果越明显,但是质量比过大,势必造成子结构的质量增加,这将给施工造成不便.当质量比为0.1时,10图中出现拐点,最优减震效果的增加趋势逐渐趋近于平缓,综合考虑,建议取阻尼器的最优质量比为0.1为佳.
图9 遗传算法迭代图
Fig.9 Genetic algorithm iterative graph
图 10 两种TMD优化结果对比图
Fig.10 Comparison of optimization results between traditional TMD and variable damping TMD
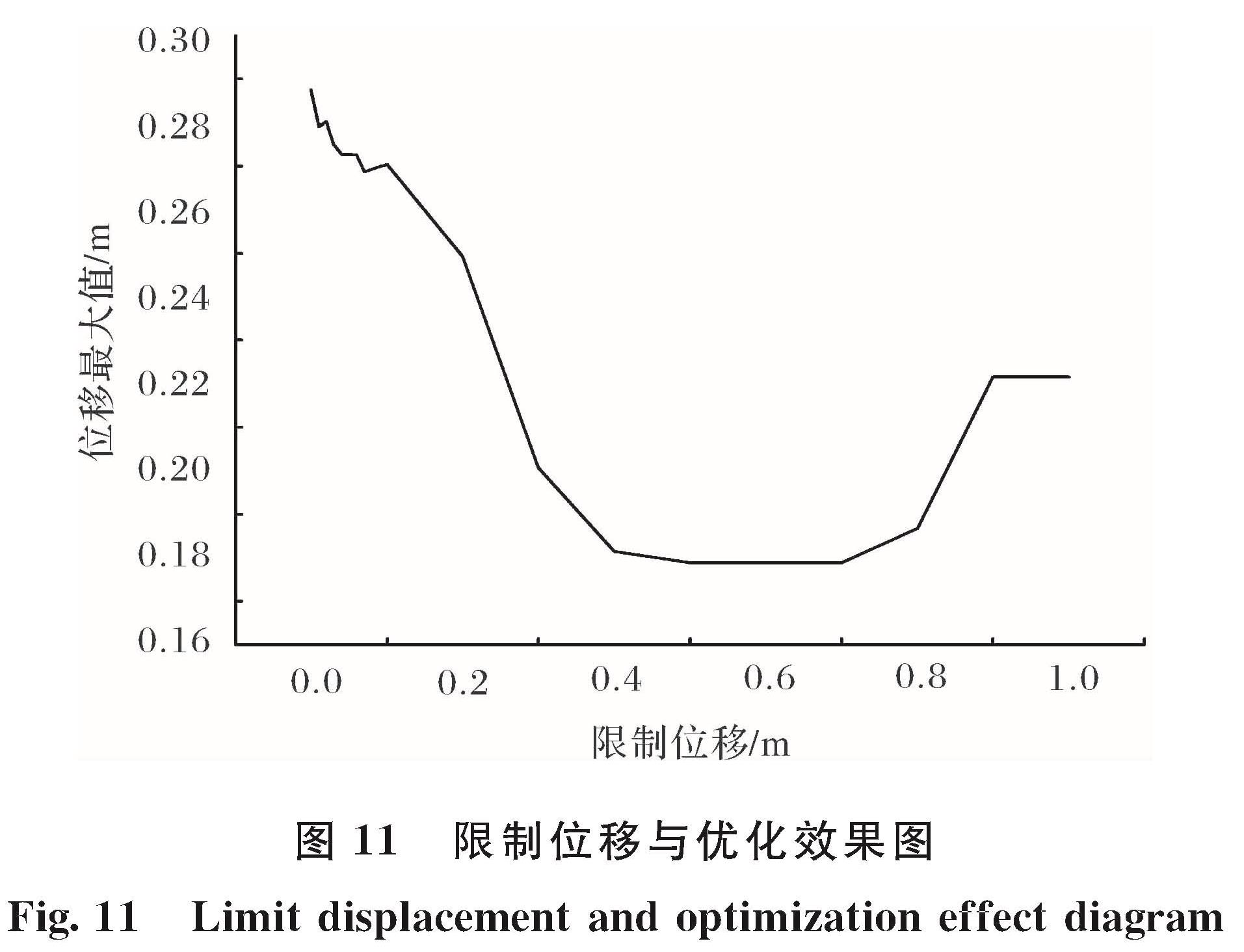
图 11为质量比为0.1时,受控系统的位移最大值与变阻尼式TMD的限制位移的关系变化图,由图中可以看出,随着限制位移的增加,主系统的最大位移呈现先降低后增加,最后呈现平直段的现象,这表明随着限制位移的增加,变阻尼式TMD对受控系统的位移最大值的减震效果呈现先增加后降低的趋势,平直段主要是由于限制位移超过变阻尼式TMD运动的最大位移所致.因此,存在一个最佳限制位移,使得变阻尼式TMD的减震效果达到最优,在对变阻尼式TMD设计制作之前,应对其进行数值分析,将其最优限制位移寻找出来.
图 11 限制位移与优化效果图
Fig.11 Limit displacement and optimization effect diagram
 (4)
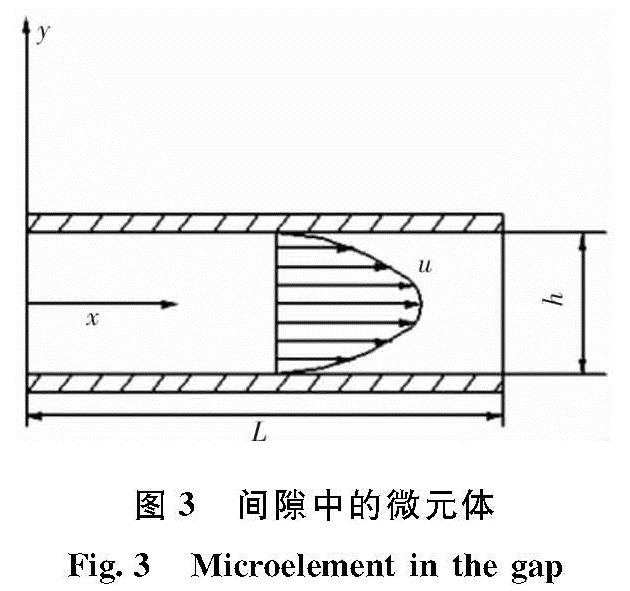
(4) 为剪切应变率,η为流动指数.当η<1时,该阻尼介质为剪切稀化流体; 当η>1时为剪切稠化流体; 当η=1时,为牛顿流体.由式(3)~(4),又有边界条件y=±h/2; u=0可得
为剪切应变率,η为流动指数.当η<1时,该阻尼介质为剪切稀化流体; 当η>1时为剪切稠化流体; 当η=1时,为牛顿流体.由式(3)~(4),又有边界条件y=±h/2; u=0可得 (5)
(5) (6)
(6) (7)
(7) (10)
(10) (11)
(11)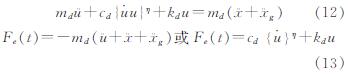
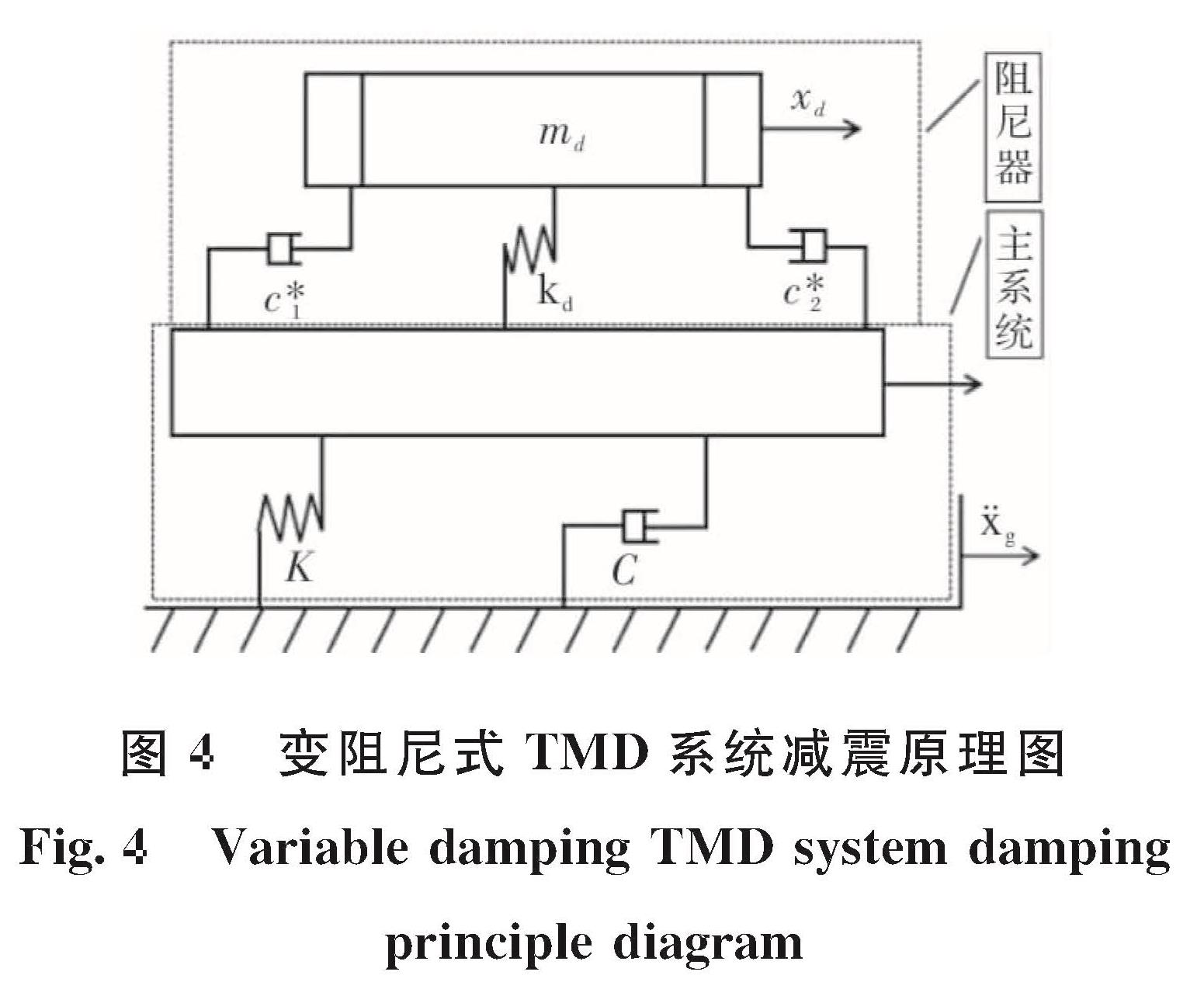
 ,ue为临界位移; η为流动指数,当η=1时,该变阻尼式TMD系统为线性系统,否则为非线性系统; xd为变阻尼式TMD系统相对于地面的位移.由式(12)可知,当变阻尼式TMD系统相对于结构的位移小于等于临界位移ue时,该变阻尼式TMD系统提供一种控制力; 当变阻尼式TMD系统相对于结构的位移大于临界位移ue时,该变阻尼式TMD系统将提供另外一种控制力,以控制结构的地震响应,使其降至所需状态.
,ue为临界位移; η为流动指数,当η=1时,该变阻尼式TMD系统为线性系统,否则为非线性系统; xd为变阻尼式TMD系统相对于地面的位移.由式(12)可知,当变阻尼式TMD系统相对于结构的位移小于等于临界位移ue时,该变阻尼式TMD系统提供一种控制力; 当变阻尼式TMD系统相对于结构的位移大于临界位移ue时,该变阻尼式TMD系统将提供另外一种控制力,以控制结构的地震响应,使其降至所需状态.