1.2 向量式结构力学的基本理论
1.2.1 空间点的运动理论
根据向量式结构力学理论,每一个结构将被离散为一系列的空间点,并用这一系列有限数目点的位置来描述复杂的结构形式和几何状态,将结构运动变形问题转变为空间点的运动问题[14].此时,结构杆件受到的荷载、内力、约束、质量和运动的条件等都集中在同一个点上,并用力和点的位移来描述,而点的运动则用牛顿第二定律计算.由于张拉整体结构中空间点的自由度只有XYZ三个方向的平移自由度,所以空间点的运动所满足的控制方程如式(1)所示[14].
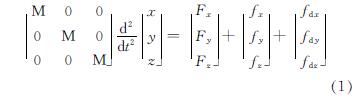
式中:假设结构中的某个空间点为Q,其位置向量为[x y z]T,外力向量为[Fx Fy Fz]T,内力向量为[fx fy fz]T,质量矩阵为 ,其中M可按式(2)[14]计算.
,其中M可按式(2)[14]计算.

式中:mQ为空间点的自身质量; λ是与空间点Q连接的构件的个数; mμ是每个连接在空间点Q的单元的质量,分配到空间点时通常为两个空间点之间单元质量的一半.[fdx fdy fdzT]是作用于空间点Q的阻尼力向量,该阻尼力在本例中是一个虚拟的阻尼力,目的是为了在该结构展开的过程中避免由荷载产生的振动效应的影响,Q点的阻尼力向量满足式(3)[14].
式中,ξ是虚拟的阻尼比.
1.2.2 运动方程的求解
为避免求解过程中出现复杂的迭代和结果不收敛的问题,根据向量式结构力学的理论,求解式(1)时采用显示积分的方法进行求解[14].因此空间点Q的加速度q¨n为

式中:Sn+1、Sn和Sn-1分别时空间点Q在n+1、n和n-1时刻的位置向量; t为计算时间.
将公式(4)和(3)代入式(1),得位移得迭代式(5).
当n=0时,则需要第-1时刻的位移S-1,所以需要中央差分公式[14]在运算起步时进行特殊的处理.设某个空间点的初始位置向量Q0,初始速度向量为(·overQ)0,初始外力向量和初始内力向量为F0和f0,由中央差分公式得以下条件.
将式(6)代入(8),并联立式(7)和(8),解得S1和S-1:
所以,将式(9)和(3)代入方程式(5)得:
当n>0时:
当n>1时,方程式为式(5).
1.2.3 空间点的外力和内力
基于向量式结构力学的基本理论[14],当任意方向的力Fr作用于空间点Q时沿着坐标轴方向的等效力分量为
Fx=Fr·ex (13)
Fy=Fr·ey (14)
Fz=Fr·ez (15)
式中,ex、ey和ez为空间点Q域坐标(x,y,z)下的基底向量.
假设杆系构件G的内力由构件长度的变化产生,即只有拉力和压力.假设空间点Q与空间点W之间由杆系构件G连接,则杆系构件G的内力集中在空间点Q为[14]:
fx=fr·ix (16)
fy=fr·iy (17)
fz=fr·iz (18)
式中:ix,iy和iz为杆系构件G的方向向量.假设空间点Q与空间点W的位置向量分别为[Qx Qy Qz]T和[Wx Wy Wz]T,则方向向量公式为[14]:
ix=(|Qx-Wx|)/L (19)
iy=(|Qy-Wy|)/L (20)
iz=(|Qz-Wz|)/L (21)
上式中,L为杆系构件G的长度,由公式(22)表示.

假设空间点Q与空间点W的初始位置向量为[Qx0 Qy0 Qz0]T和[Wx0 Wy0 Wz0]T,则杆系构件G的原长L0为:

由材料力学的理论[15]可知,杆系构件G的拉力或压力为

式中,E为弹性模量,A为构件截面面积.当fr为正,则为拉力; 若fr为负,则为压力.
1.2.4 中央差分步长的估算
精确的增量时间步长是中央差分计算得以稳定收敛的前提.换而言之,当计算时间步长t小于临界步长t0时,持续计算所得的累积误差才可以维持在容许的范围内,即收敛为一个较为精确的结果.当计算时间步长t小于临界步长t0时,计算结果将不收敛.
然而,构件的运动行为和参数值对临界步长的确定有直接的影响.不同的结构对应不同的临界步长,同一种结构不同的变量方程所要求的临界步长也不同.因此文献[14]中以一个刚性杆件结构为例,推导出了临界步长的估算公式,并应用到该文献柔性结构的算例中.所以,本文的算例参考公式(25)估算临界步长为
式中:LP为连接空间点Q的所有构件的平均长度,φ为构件的质量密度.
1.2.5 被动索限值的确定
对于本文的驱动方式,在张拉整体结构运动的过程中,被动索往往会受压并退出计算,其限值FB由公式(26)求出.

式(26)和(27)中,FB为被动索受到的压力; fr由式(26)计算可得; FPD是被动索是否参与下一时刻计算的判定条件; FZ是主动索连接的两个空间点所受到的力; qZ和qB分别是主动索和被动索力密度的比值; LZ和LB分别是几何稳定下,张拉整体结构中主动索和被动索的长度.在确定结构折叠形态的过程中,当FB<FPD时,被动索继续参与下一时刻的计算; 当FB≥FPD时,被动索不参与下一时刻的计算.
令
FB=FPD (28)
联立方程(26)、(27)和(24)可得当被动索受到的压力FB等于FPD时,被动索的长度LPD由下式表示:

式中:E为杨氏模量; A为截面面积; FB由第一个程序输出.在结构进行展开运动的过程中,当被动所连接的两个空间点上的距离LBD<LPD时,则被动索不进入下一个时刻的计算; 当LBD>LPD时,被动索进入下一个时刻的计算.
1.3 张拉整体结构的几何稳定性
假设一个空间网格体系有w根杆件和v个自由度,其自应力模态数为ZS和独立机构位移模态数Dm可分别由以下公式确定[16]:
ZS=w-rA (30)
Dm=dKv-rA (31)
式中:rA是平衡矩阵的秩,dK是结构的空间维数.当ZS=0和Dm>0时,结构将转化为可发生有限位移的机构; 当ZS>0和Dm>0时,结构将变成同时拥有机构位移和自应力模态的张拉整体结构.在分析张拉整体结构时,首先需要考察其自应力模态能否刚化其无穷小机构位移模态,同时最终的自应力模态必须满足压杆受压、拉索受拉的条件,因为拉索只具有单向的受拉刚度,无法承受压力[17].
切线刚度矩阵KT的正定性可判断张拉整体结构的稳定性,其表达式(32)所示[18]:

式中:KE是结构的切线刚度; KG是与自应力模态有关的几何刚度矩阵; E为弹性模量; A为构件截面面积; LT为杆件的原长; I∈R3×3为单位矩阵; 为张量积.平衡矩阵B和矩阵β由式(33)和(34)表示[19]:
其中:H=diag(q)
式中,H是力密度矩阵; 矩阵q由式(35)和(36)表示:
式中:LTδ为单元长度; Fδ为单元的力.假设φ和ψ(φ<ψ)为连接构件两端的节点,则关联矩阵C第γ行的元素公式(37)表示
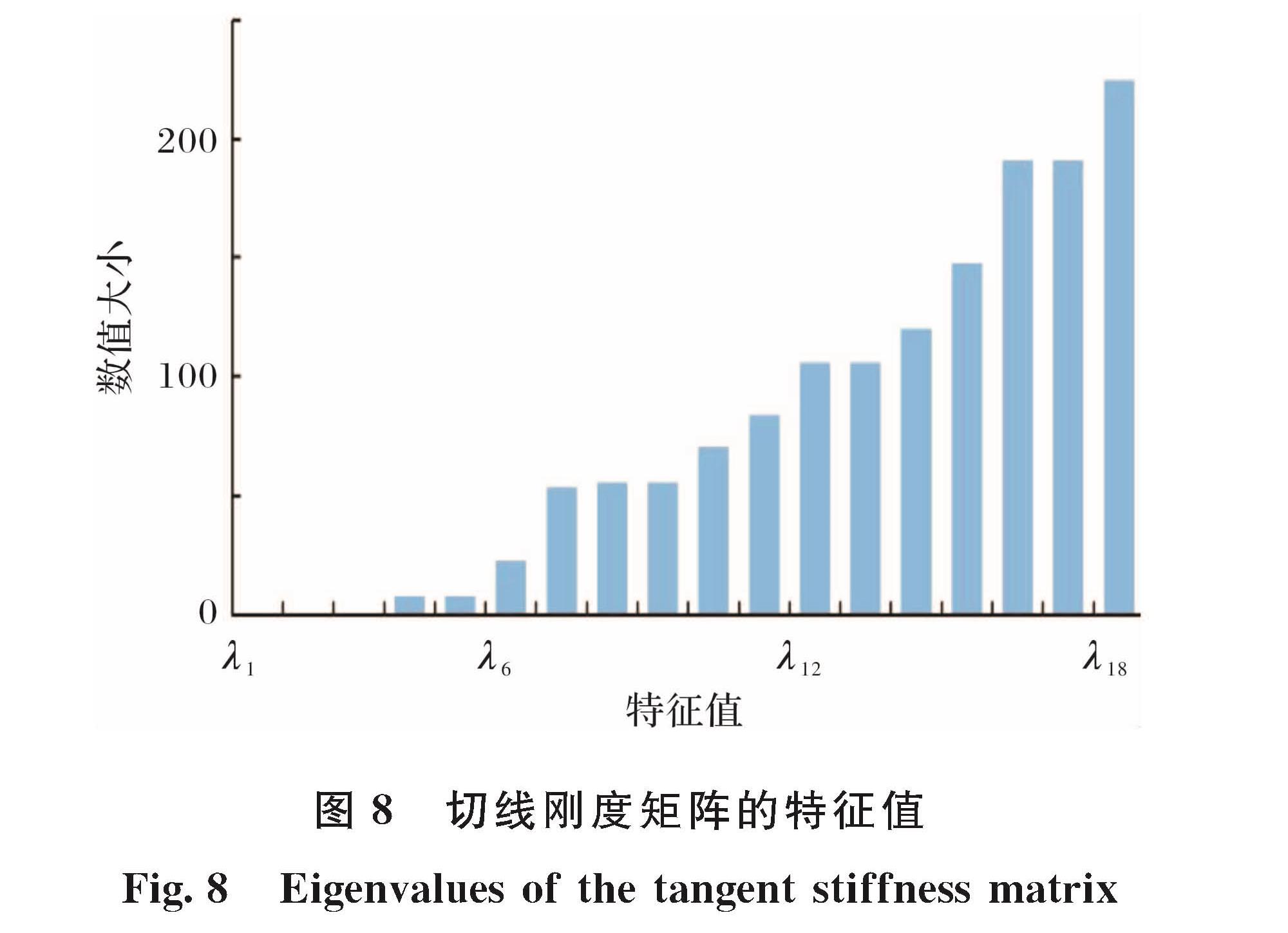
在忽略刚体位移的情况下,若切线刚度矩阵是正定的,即满足式(38)时该张拉整体结构体系是稳定的:
eig(KT)=λ1≤λ2≤…≤λσ(38)
式中,σ为最后一项.