3.1 几何对称找形分析
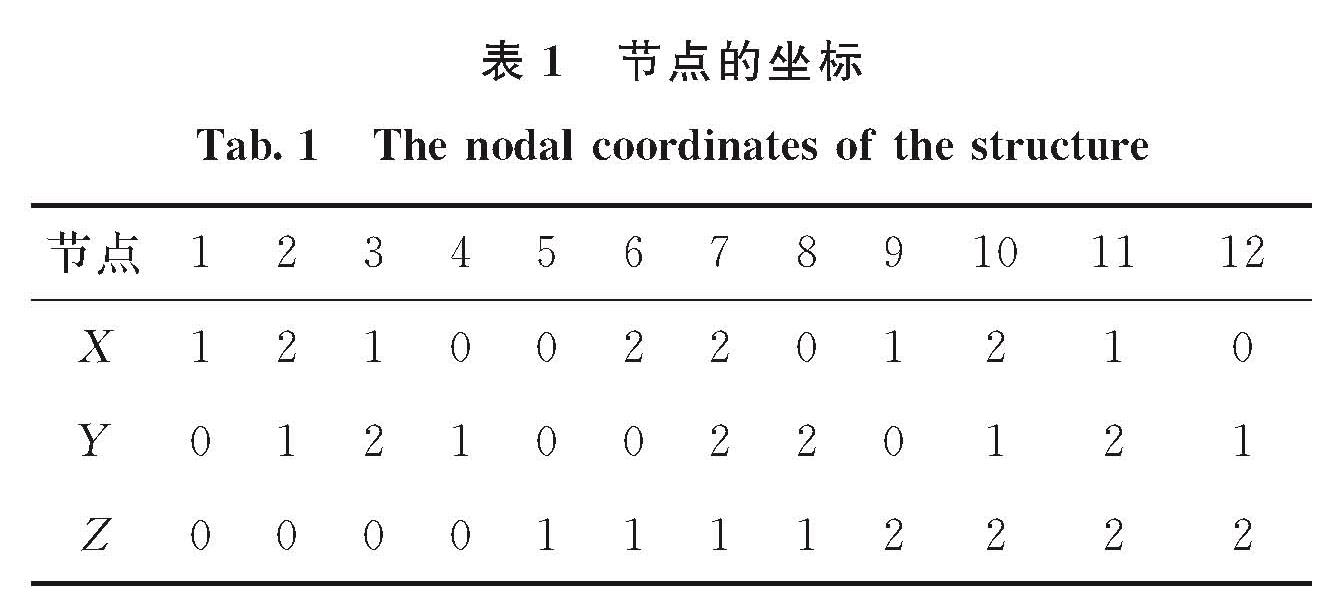
根据几何对称性将索单元分为4组,杆单元分为1组,具体分组如图2所示.经1.3节公式计算得s~=1,因此可说明该结构在此对称分组状态下存在唯一初始力密度,并与Zhou[20-21]所提出的几何对称张拉整体结构找形方法求解结果一致,如表2,其中设计误差k=1.868 0e-1满足设计要求.但文献中所阐述的找形方法无法事先确定结构构件的拉压关系,且找形结果单一.而本文可根据不同的对称分组情况求解出多种初始力密度结果,这也正是本文算法的优势所在.
在上述初始力密度作用下,可根据式(26)考虑该结构的稳定性,其中切向刚度矩阵特征值如表3所示,从表中可以看出最小特征值为正值,则说明结构处于稳定状态.
表2 张拉整体结构初始力密度(h=5)
Tab.2 Initial force density of the tensegrity structure(h=5)
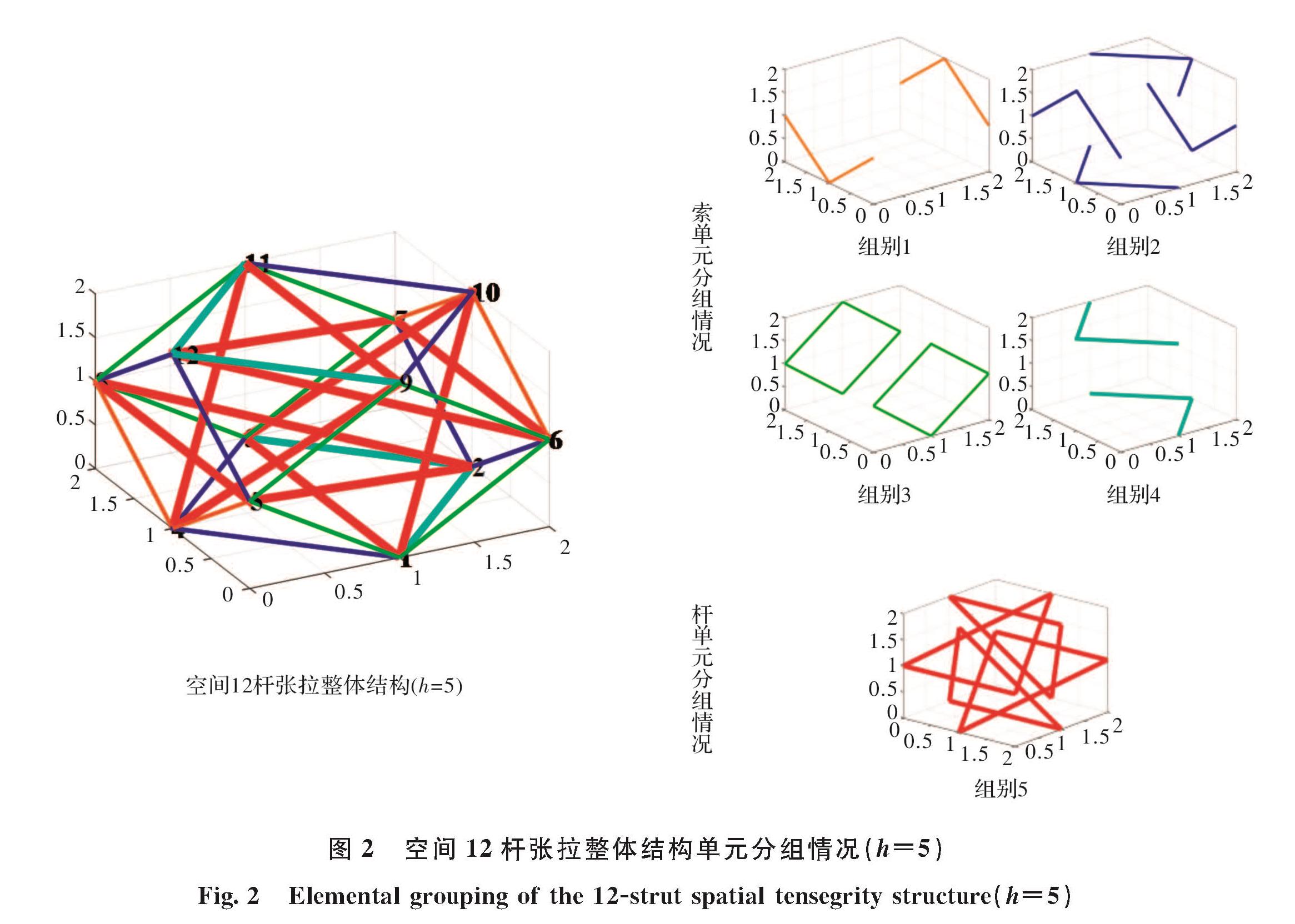
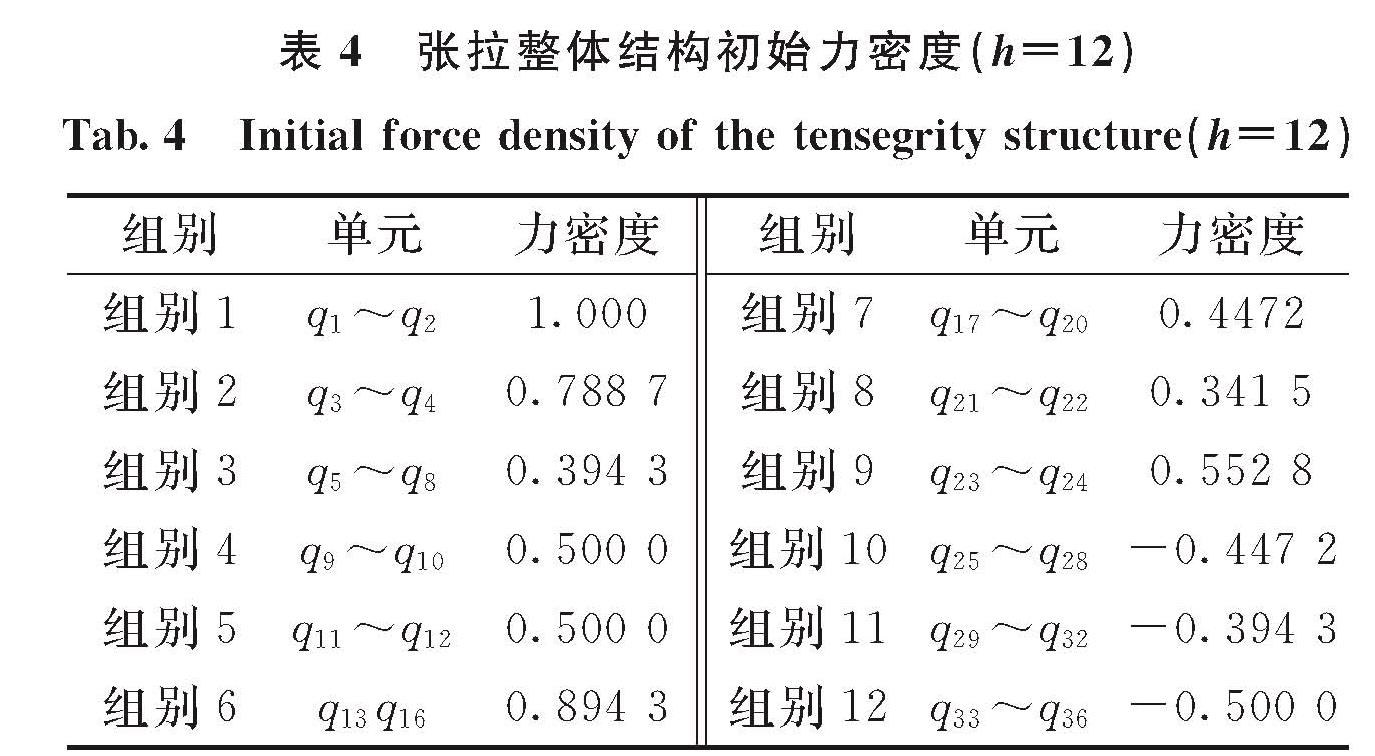
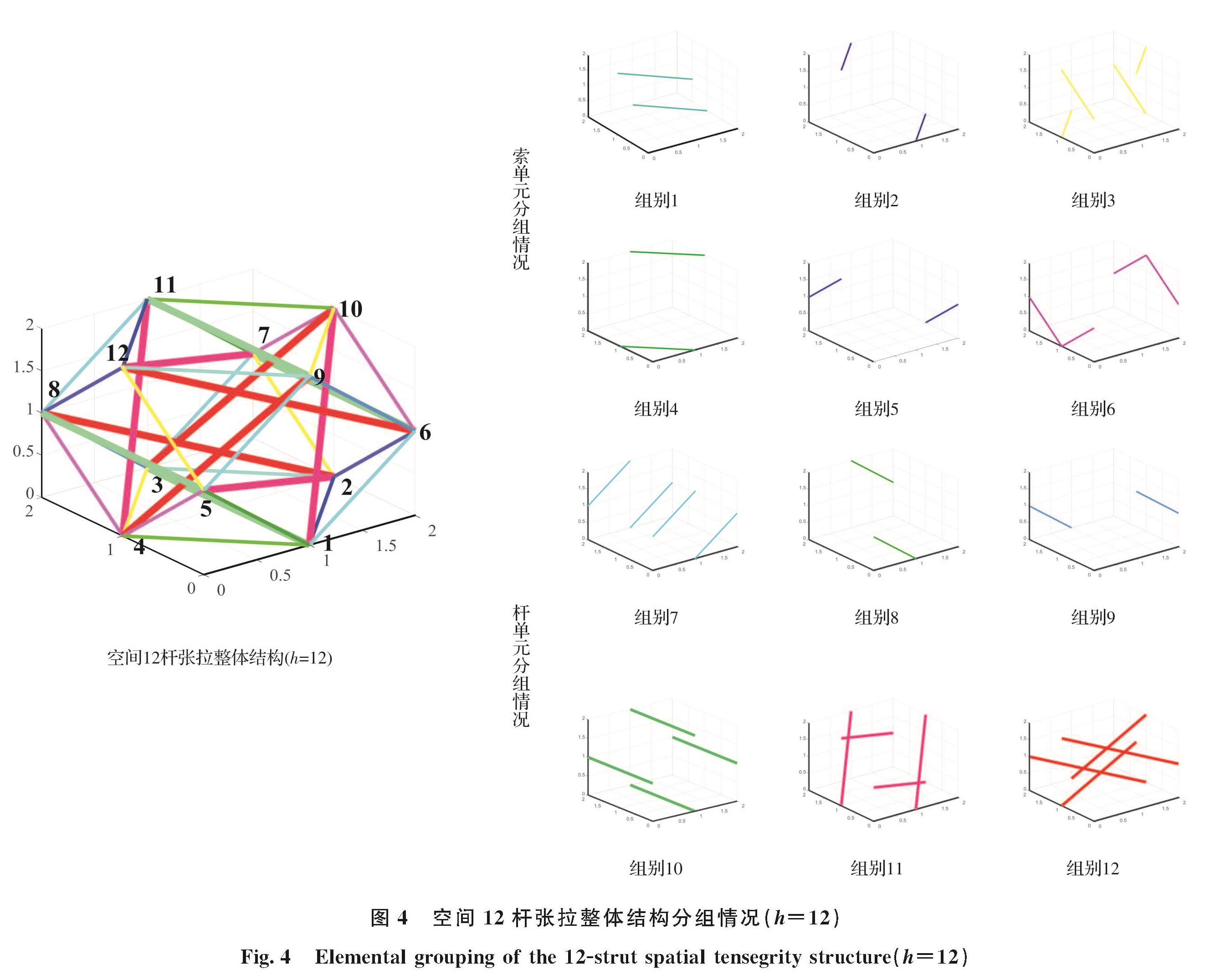
为进一步阐述本文算法优势,展现多种初始力密度状态的求解能力,可将空间12杆张拉整体结构划分为12组,具体分组情况如图4.此时计算得到的s~=2,则说明该分组情况下具有多种初始力密度,因此需要以分组构件力密度标准差作为目标函数进行优化(图3),优化结果如表4,并根据式(25)求得误差值k=7.474 8e14,满足设计要求.
表3 12杆张拉整体结构切线刚度矩阵特征值(h=5)
Tab.3 Eigenvalues of the tangent stiffness matrix of the 12-strut tensegrity structure(h=5)
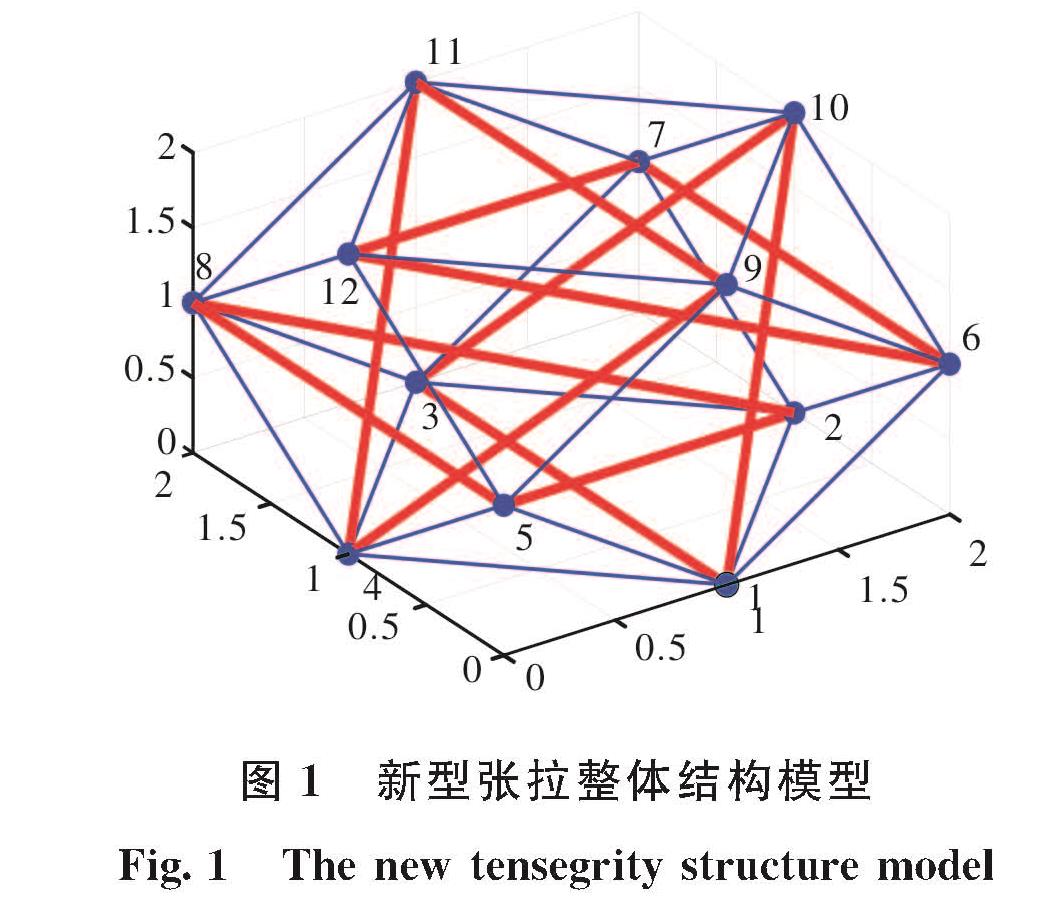
图2 空间12杆张拉整体结构单元分组情况(h=5)
Fig.2 Elemental grouping of the 12-strut spatial tensegrity structure(h=5)
图3 目标函数的迭代过程(h=12)
Fig.3 Convergence process of the target function(h=12)
表4 张拉整体结构初始力密度(h=12)
Tab.4 Initial force density of the tensegrity structure(h=12)
对比两种分组结果,由于分组的不同,最终得到的力密度值也会随之改变,从表5中可以看出h=5情况下结构的切线刚度矩阵最小特征值仍为正值,因此可以保证在该力密度作用下结构仍处于稳定状态,同时对比表3,在均满足结构稳定的条件下,12组分组(h=12)情况下结构所形成的刚度要略优于5组分组(h=5)的结构.
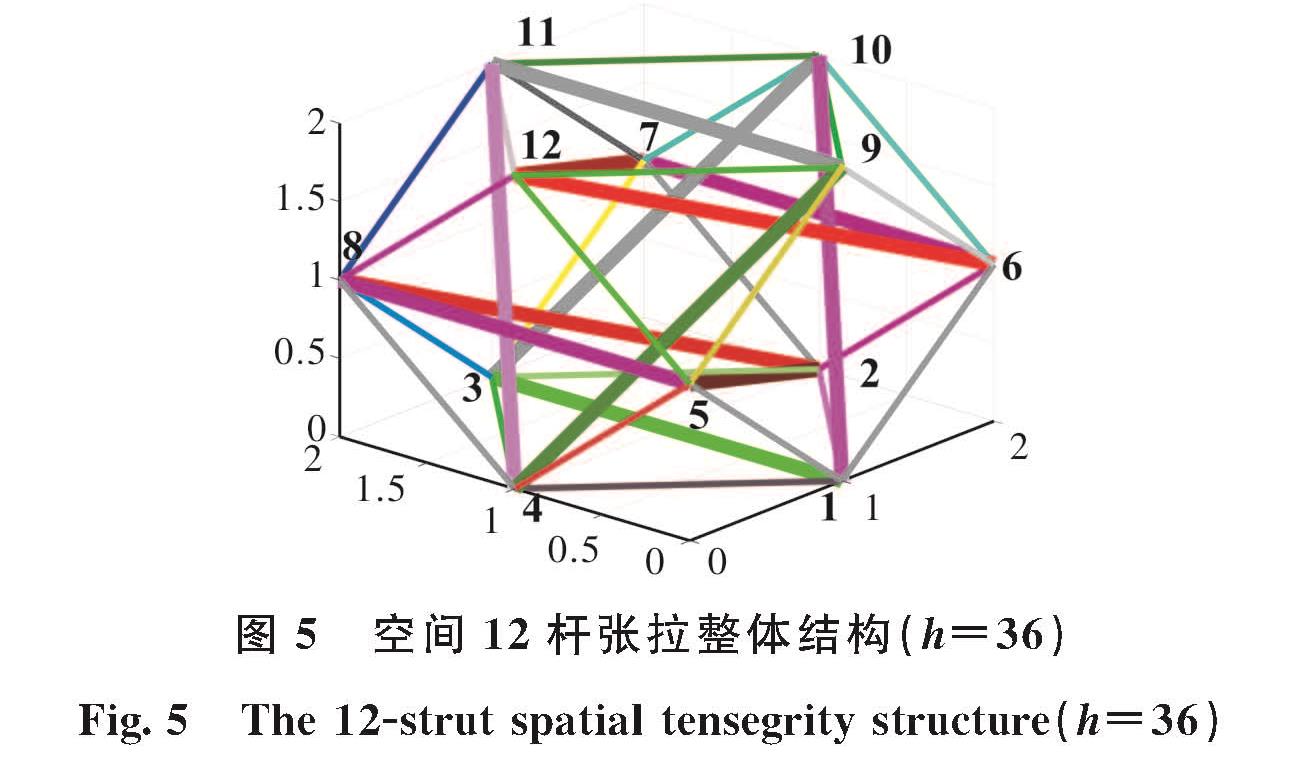
现将结构分组增至36组,即单根构件各为一组(以不同颜色表示),如图5.通过计算得到s~=6,且与未分组时的自应力模态数s相同,则说明构件分组的方法并未起到减小自应力模态数的作用.但此时分组的目的仅是为了确定结构内部的拉压关系,进而确保计算结果满足结构杆件的拉压关系.
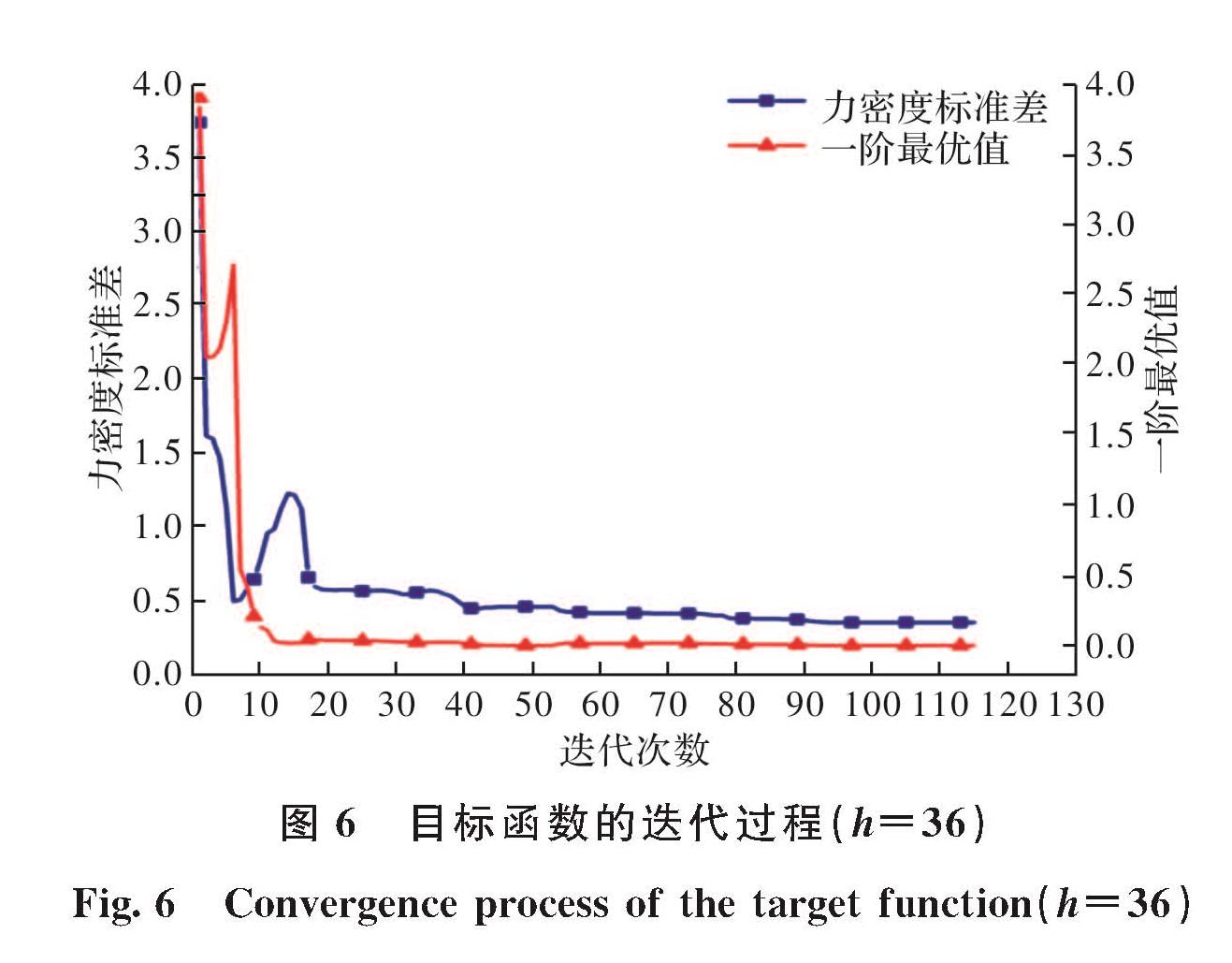
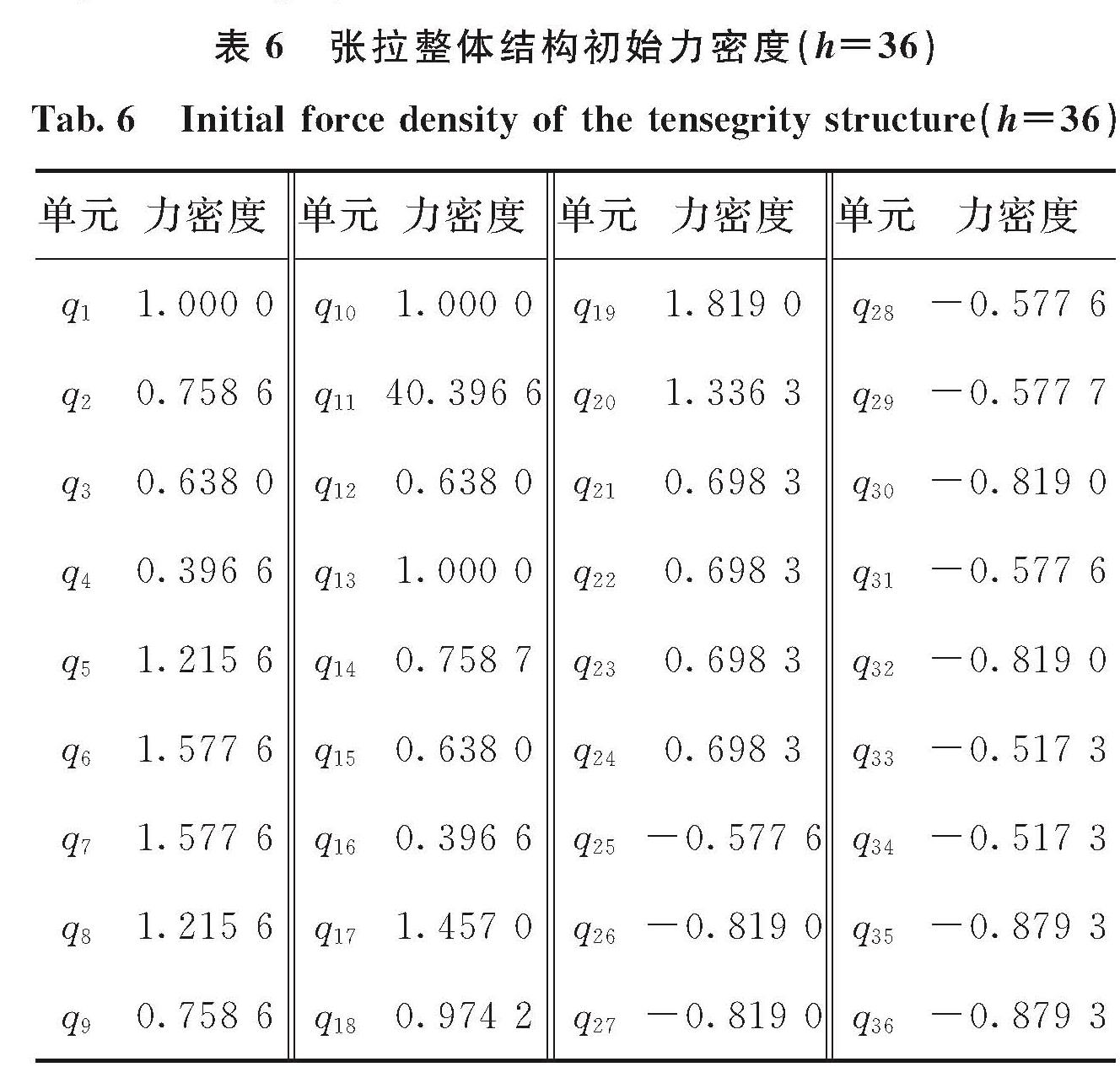
通过内点法优化(图6),可以看出力密度标准差处于波动下降,在经过60次迭代后趋于稳定,同时一阶最优值在前15次迭代时已趋于0.最终得到的初始力密度值计算设计误差为k=8.892 0e-14,具体力密度数值如表6所示.
表5 空间12杆张拉整体结构切线刚度矩阵特征值(h=12)
Tab.5 Eigenvalues of the tangent stiffness matrix of the 12-struts tensegrity structure in space(h=12)
图4 空间12杆张拉整体结构分组情况(h=12)
Fig.4 Elemental grouping of the 12-strut spatial tensegrity structure(h=12)
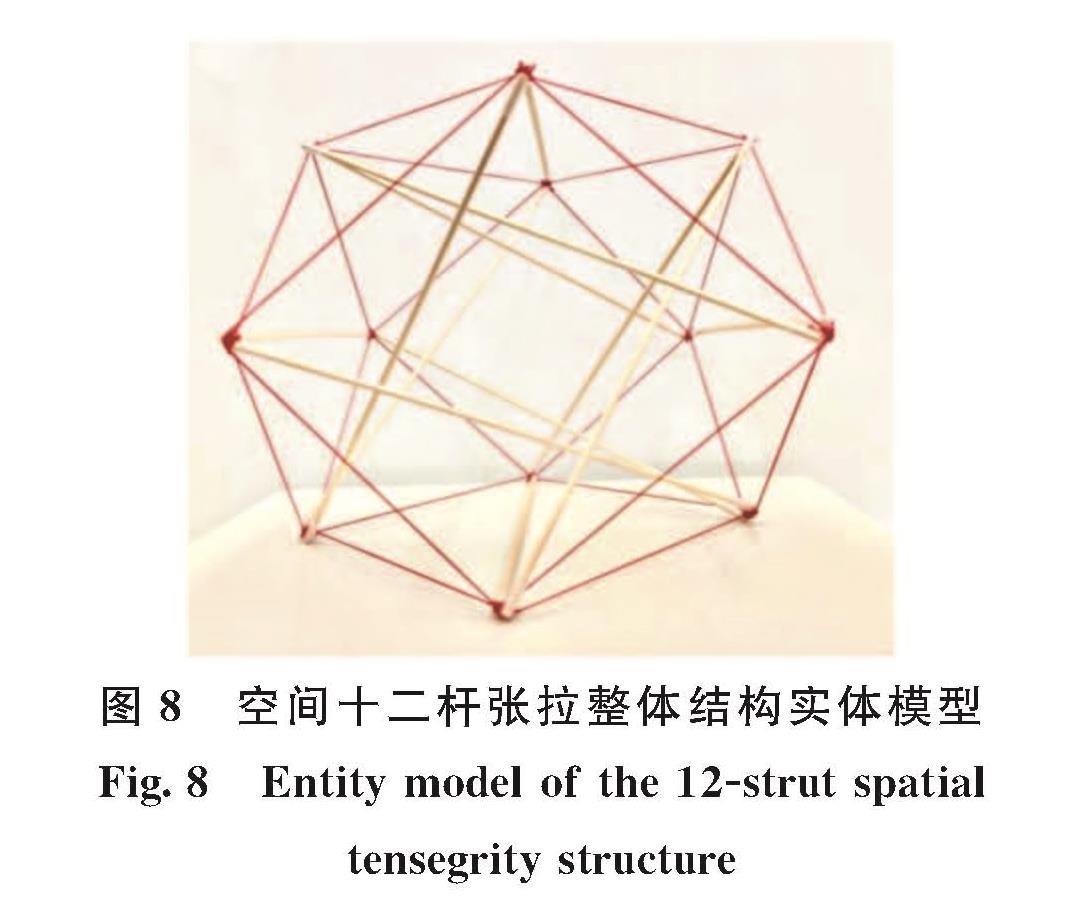
图5 空间12杆张拉整体结构(h=36)
Fig.5 The 12-strut spatial tensegrity structure(h=36)
图6 目标函数的迭代过程(h=36)
Fig.6 Convergence process of the target function(h=36)
表6 张拉整体结构初始力密度(h=36)
Tab.6 Initial force density of the tensegrity structure(h=36)
同时需对结构进行稳定性计算,求解得到切线刚度最小特征值为20.4484大于0,则说明结构稳定,具体数据如表7.单根构件各为一组的情况同样符合非对称结构的分组求解方式.因此,本文算法也可适用于非对称结构的初始力密度求解.
表7 空间12杆张拉整体结构切线刚度矩阵特征值(h=36)
Tab.7 Eigenvalues of the tangent stiffness matrix of the 12-strut spatial tensegrity structure(h=36)