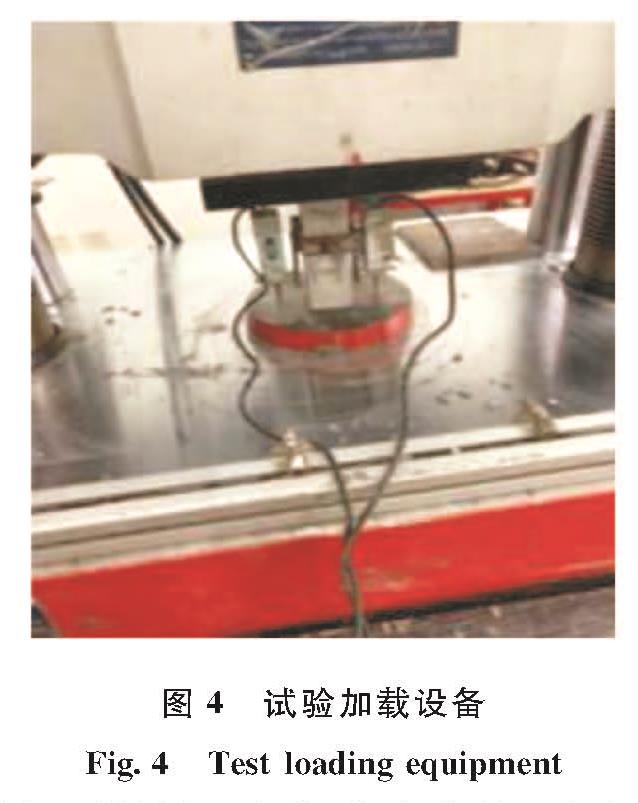
为验证算法在真实变形中的可靠性及实际应用性能,本文采用混凝土单轴压缩试验数据作为验证数据.试验对象为C60混凝土试件,采用西安建筑科技大学土木工程学院的WE-30型电子万能加载试验机(如图4所示)测量弹性模量试验,最大承重荷载为300 kN,测量精度≤±1%.试验前对混凝土试件表面进行人工诱导损伤,图像采集系统为高清照相机,试验过程采用LED直流光源进行补光.试验过程中,混凝土位移场的测量时产生的误差是由于算法系统误差、相机发热,镜头畸变、拍摄采光、振动噪声等问题引起.
图4 试验加载设备
Fig.4 Test loading equipment
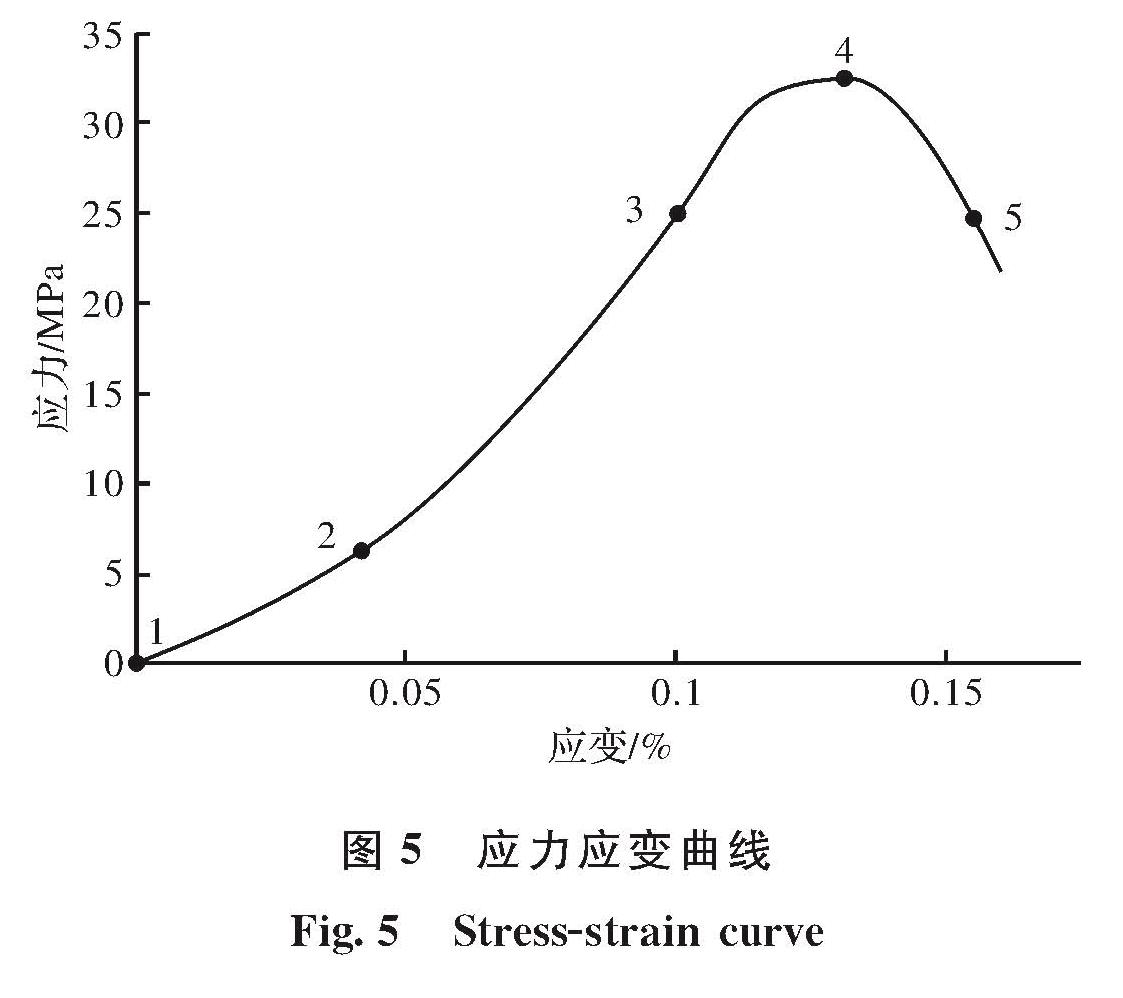
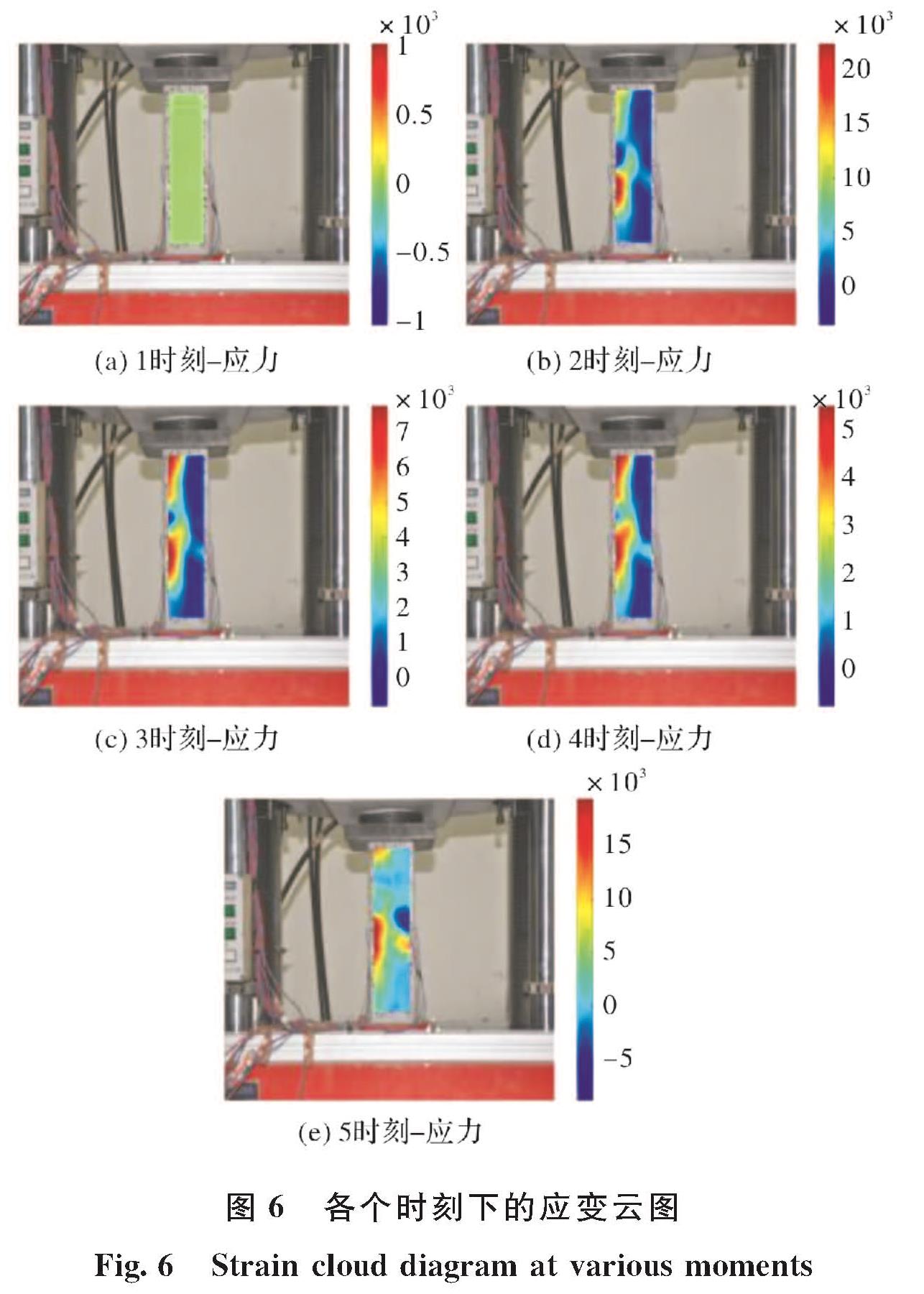
试验得到混凝土应力-应变曲线,如图5所示,将该曲线上不同时刻的点对应的应变云图绘制于图6.根据全场的应变云图可以清晰地从应变场分析混凝土单轴压缩下的裂纹演化规律,从细观角度观察混凝土试件的全局损伤特征.
由图5可以看出,1时刻为荷载施加初期,对应于图6(a)的应变云图,此时刻试件应变较小,此后,随着荷载的增加,混凝土压应变增加.图5中2时刻混凝土试件上出现了微小裂缝,试件开始微破裂阶段,表面开始不平整,所对应的全场应变云图如图6(b)所示,在云图中出现了不均匀化的应变区域,试件的左上方区域和底部偏上区域尤为明显.3时刻对应图6(c)所得的应变云图,此时在试件的左上方已经出现了应变集中区域,此时裂纹并未贯穿整个试件,此后应力应变曲线呈凸形,试件进入塑性阶段,应变急剧增大.到达4时刻时,由图6(d)可看出此时裂纹已经贯穿整个试件并且表现有较大变形,应力也达到了最大,试件遭到了破坏,但是此时试件并未完全碎裂仍能基本保持棱柱体形貌.此后,应力不断下降,混凝土破坏,但仍具有一定的承载能力,随着应力的变化,试件继续受应力作用,裂纹不断拓展直至整个试件完全碎裂.5时刻混凝土已完全破坏,由图6(e)亦可看出,此时的大应变集中区域遍布整个试件,此时试件表面已经布满裂纹,无法继续承载.
图5 应力应变曲线
Fig.5 Stress-strain curve
图6 各个时刻下的应变云图
Fig.6 Strain cloud diagram at various moments
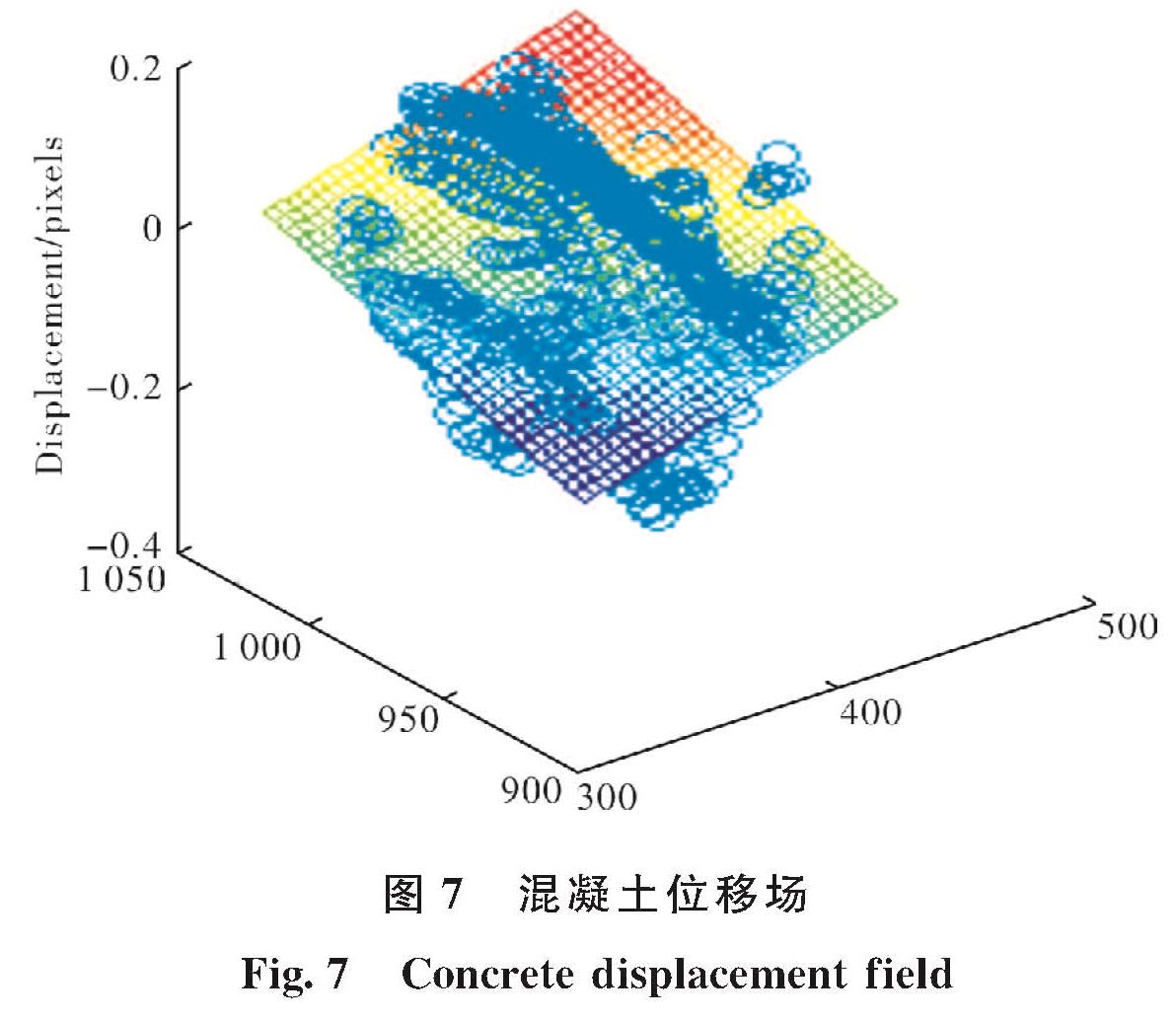
此外,为了验证本文算法在实际噪声环境中的抗噪能力,进行了另一组实验,在试验机处于工作状态时采集试件表面图像,试验机工作时的振动噪声会使得混凝土试件表面产生微振动,而且影响成像设备的图像质量.此时,对混凝土试件不进行任何操作,试件的理论位移为0 pixel.利用数字图像相关法对上述采集的图像进行计算,结果如图7所示,由图可以看出,混凝土表面产生了位移,因此,可以通过计算上述图像的位移误差来对比算法的抗噪能力.
图7 混凝土位移场
Fig.7 Concrete displacement field
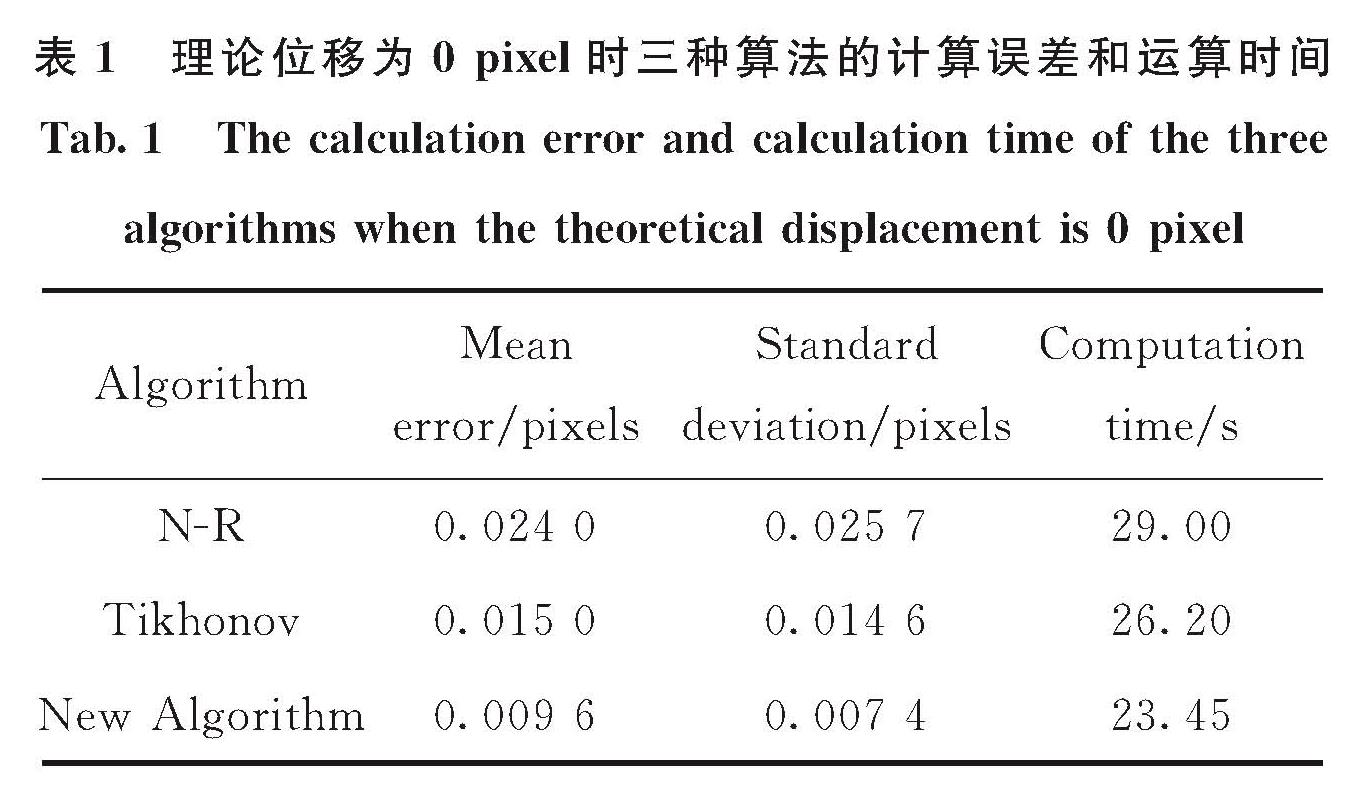
分别使用三种算法对两幅散斑图进行变形场测量.表1为理论位移为0 pixel时三种算法的误差和运算时间,由表1可知,N-R法和Tikhonov法的均值误差分别是本文算法的2.5倍和1.5倍,标准差分别是本文算法的3.5倍和2倍,本文算法相比N-R法和Tikhonov法计算效率别提升了20%和10%.在实际的噪声环境中,相比N-R法和Tikhonov法,Huber函数正则化方法所得的灰度梯度可以有效减小噪声对测量值的影响,提高了数字图像相关法在混凝土变形测量中的抗噪能力,提高了数字图像相关法的计算精度和计算效率.
表1 理论位移为0 pixel时三种算法的计算误差和运算时间
Tab.1 The calculation error and calculation time of the three algorithms when the theoretical displacement is 0 pixel



 y*(t)为y*(t)的梯度.
y*(t)为y*(t)的梯度. (6)
(6) y*(t))为Huber函数,表达式如下,即
y*(t))为Huber函数,表达式如下,即
 y*(t)‖1=
y*(t)‖1= +
+ +L+
+L+ ,且
,且 可由有限差分求出,即
可由有限差分求出,即 ≈(y*(t+h)-y*(t))/h; h为步长.
≈(y*(t+h)-y*(t))/h; h为步长.
 (8)
(8) (9)
(9) (10)
(10) (11)
(11) (12)
(12)
 (14)
(14)