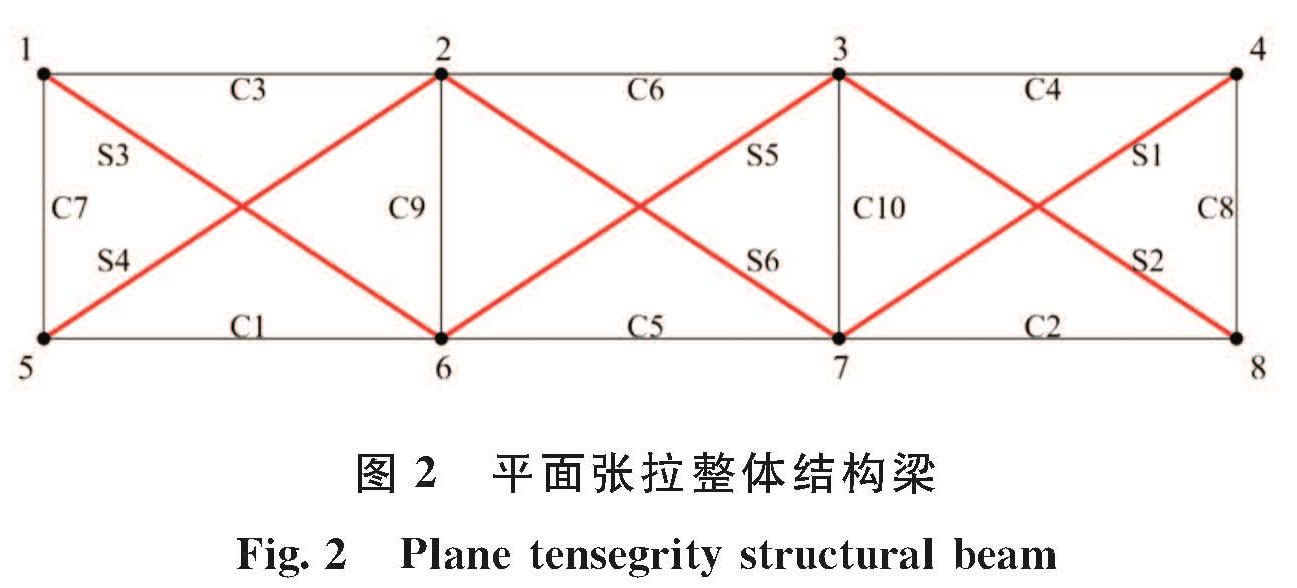
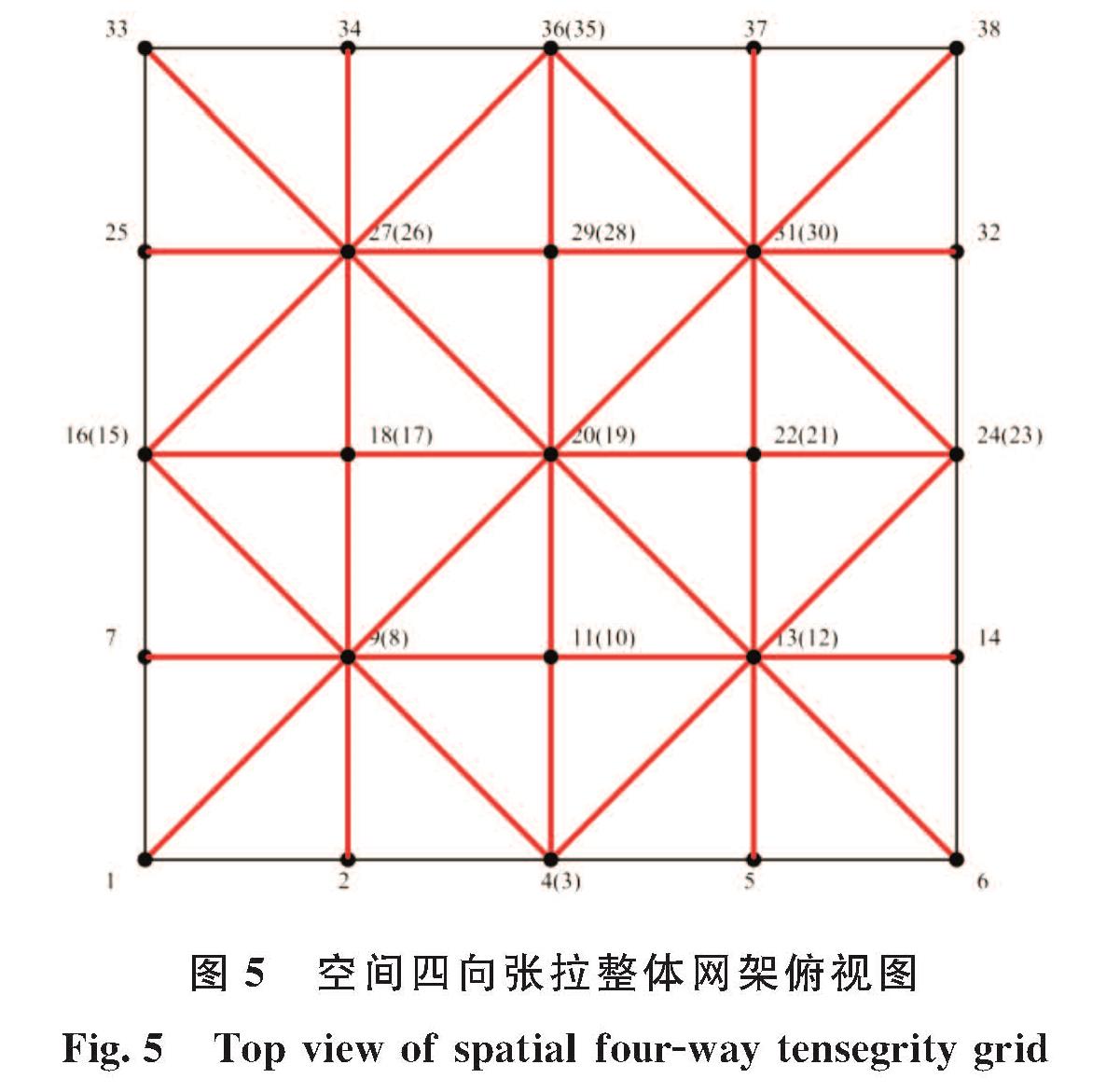
本节给出两个张拉整体网架结构的数值算例(同时考虑平面和空间两种形式),其中3.1节中的平面张拉整体结构为一类张拉整体(压杆不接触),3.2节中的空间张拉整体结构为二类张拉整体(压杆接触).图2中数字代表结构节点,黑色线条代表压杆C1~C10、红色线条代表拉索S1~S6. 图5为空间结构俯视图,下层节点与上层节点在平面上表现为同一个点,两个数字表示该点空间上的两个结构节点,同样的,黑色线条代表压杆、红色线条代表拉索. 从图2与图5中,可以直观观察出,均由一组不连续的受压单元与一组连续的受拉单元组成的,完全符合张拉整体结构的定义. 算例表明,本文所提出的算法流程(图1)对于满足结构稳定性要求的张拉整体结构具有显著的效果.
3.1 平面张拉整体结构梁
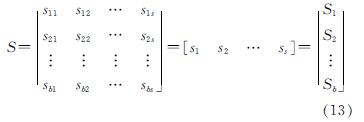
该结构采用的是由 单元组成的平面张拉整体梁,具有八个节点、六根压杆、十根拉索. 通过公式(5)确定结构具有三组自应力模态.
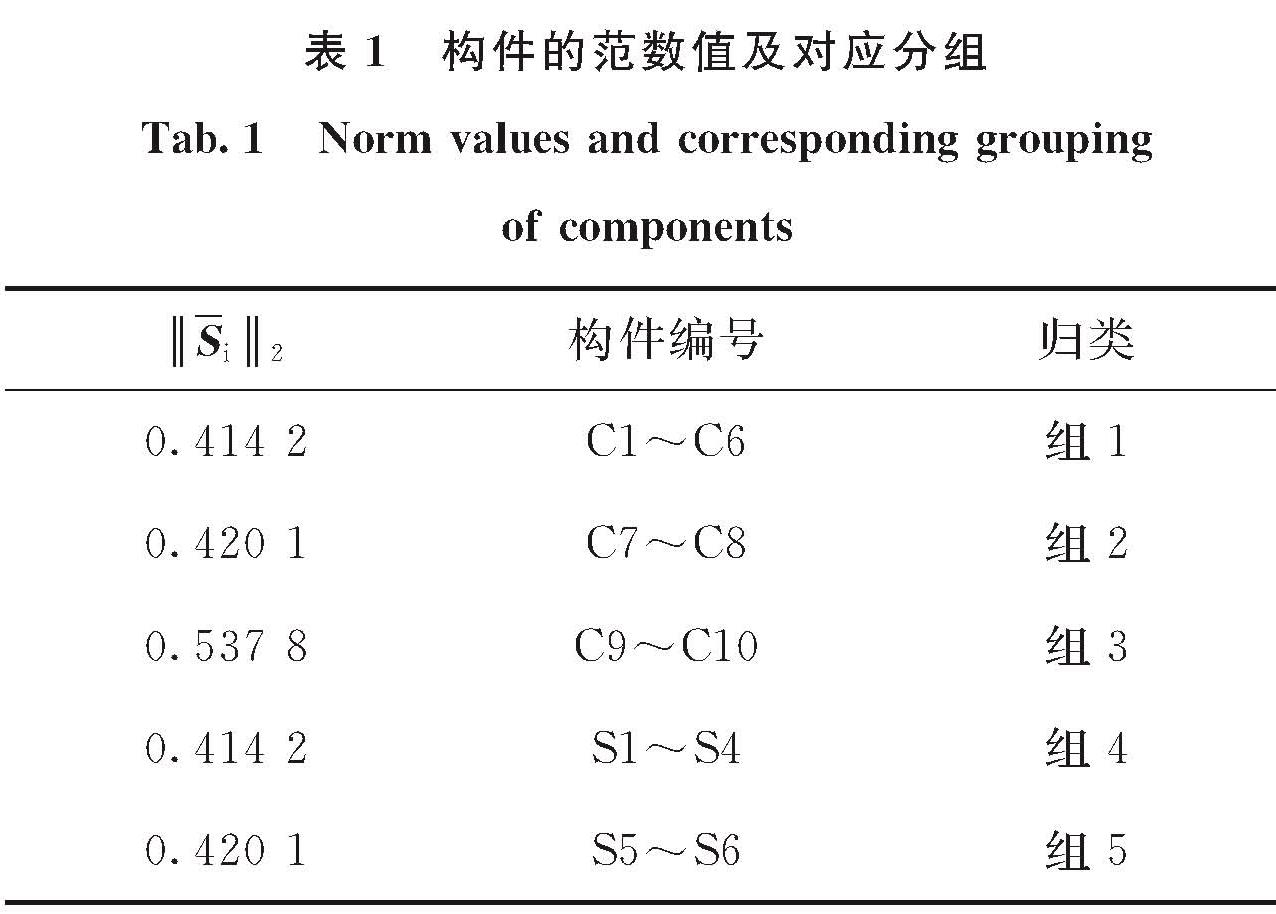
根据L2范数值表现出的结构对称性,得到索单元分为3组,杆单元分为2组,如表1所示.
表1 构件的范数值及对应分组
Tab.1 Norm values and corresponding grouping of components
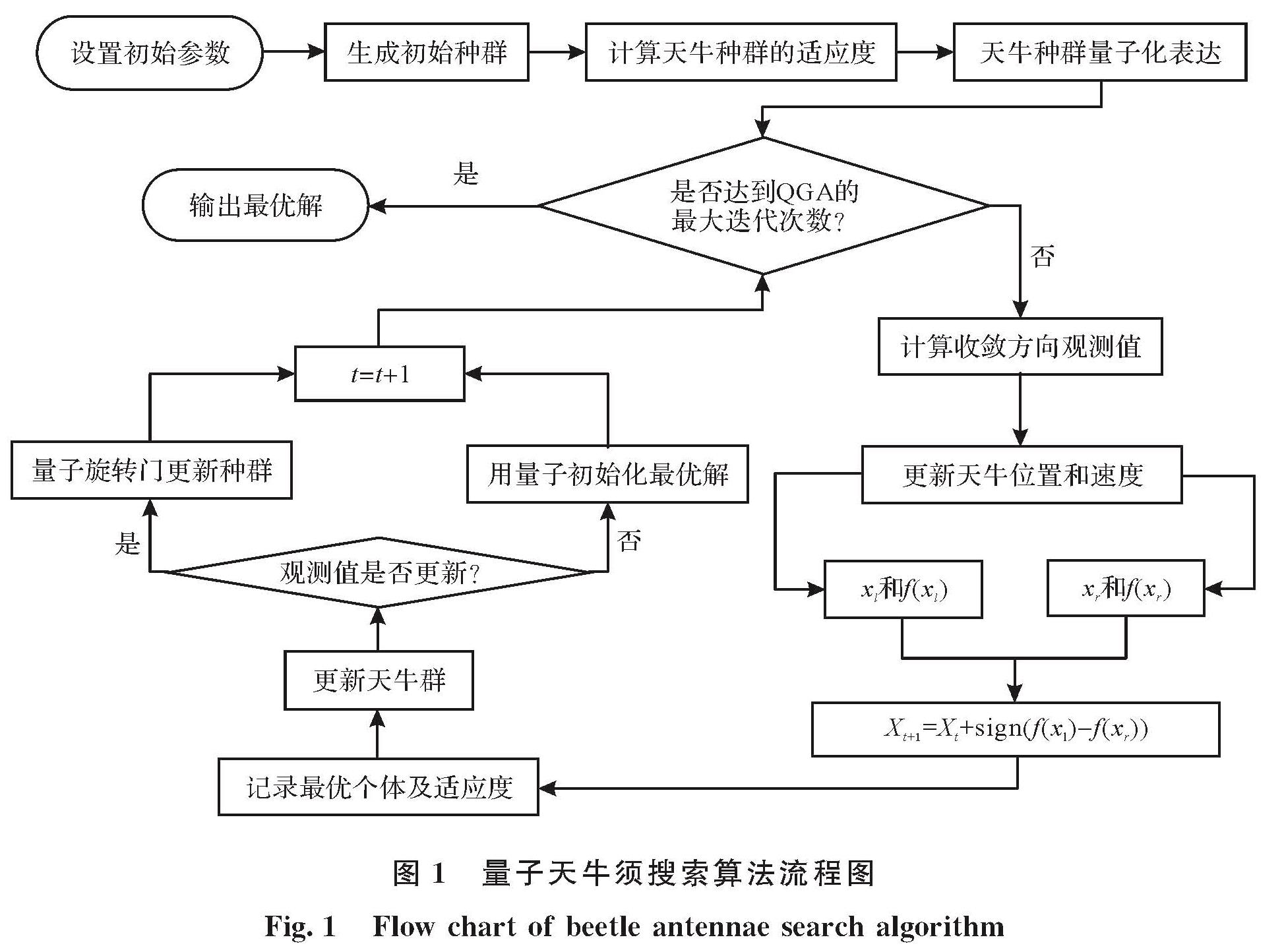
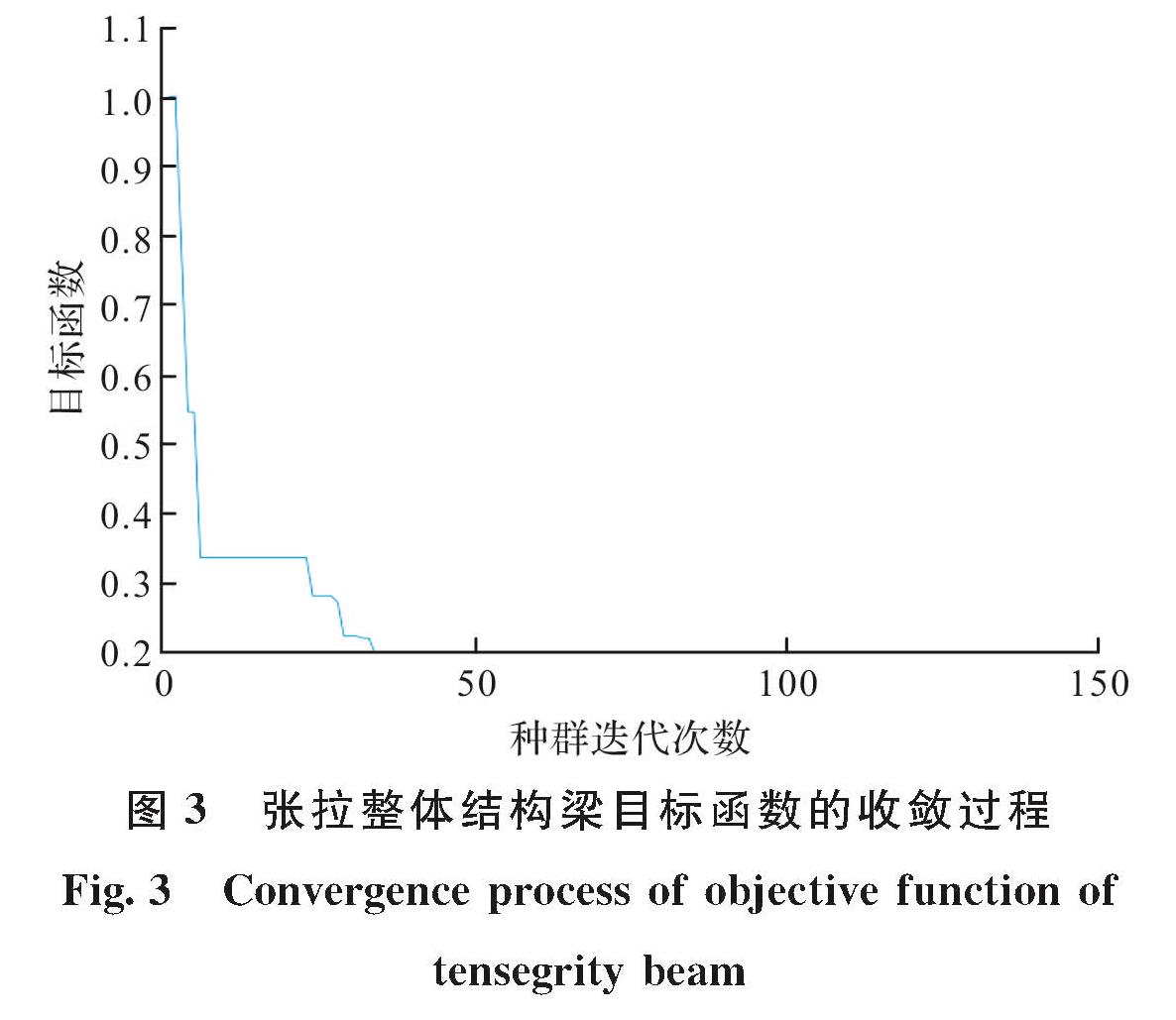
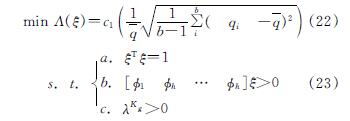
此时采用量子天牛须搜索算法:设置40个天牛个体组成的初始种群,每只天牛搜索的每一步步长长度为1,步长常数c=10,eta=0.95,每次迭代采用式(35)、(36)的量子旋转门进行种群更新,最大迭代次数为150次. 经过如图1的算法流程,可以得到如图3的收敛结果:算法运行3.189 s后目标函数在第35代收敛至最小值.
图3 张拉整体结构梁目标函数的收敛过程
Fig.3 Convergence process of objective function of tensegrity beam
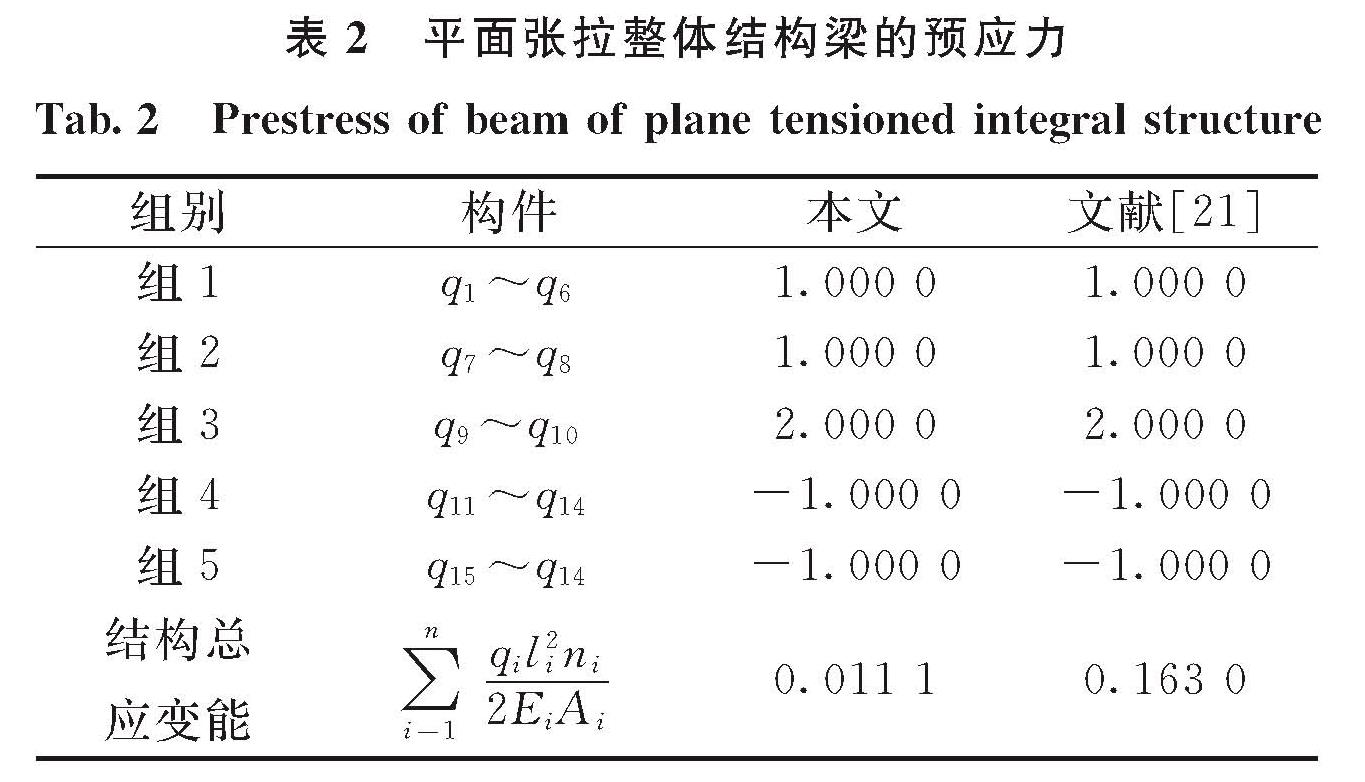
表2给出了通过量子天牛须算法求解的预应力. 结果表明,本文与文献[21]所提出的五组分组方案的结果一致,且结构总应变能更小,在张拉成形时,外力做功更小,经济效益更好,验算误差为k=1.137 6e-15<10e-10,满足误差要求.
表2 平面张拉整体结构梁的预应力
Tab.2 Prestress of beam of plane tensioned integral structure
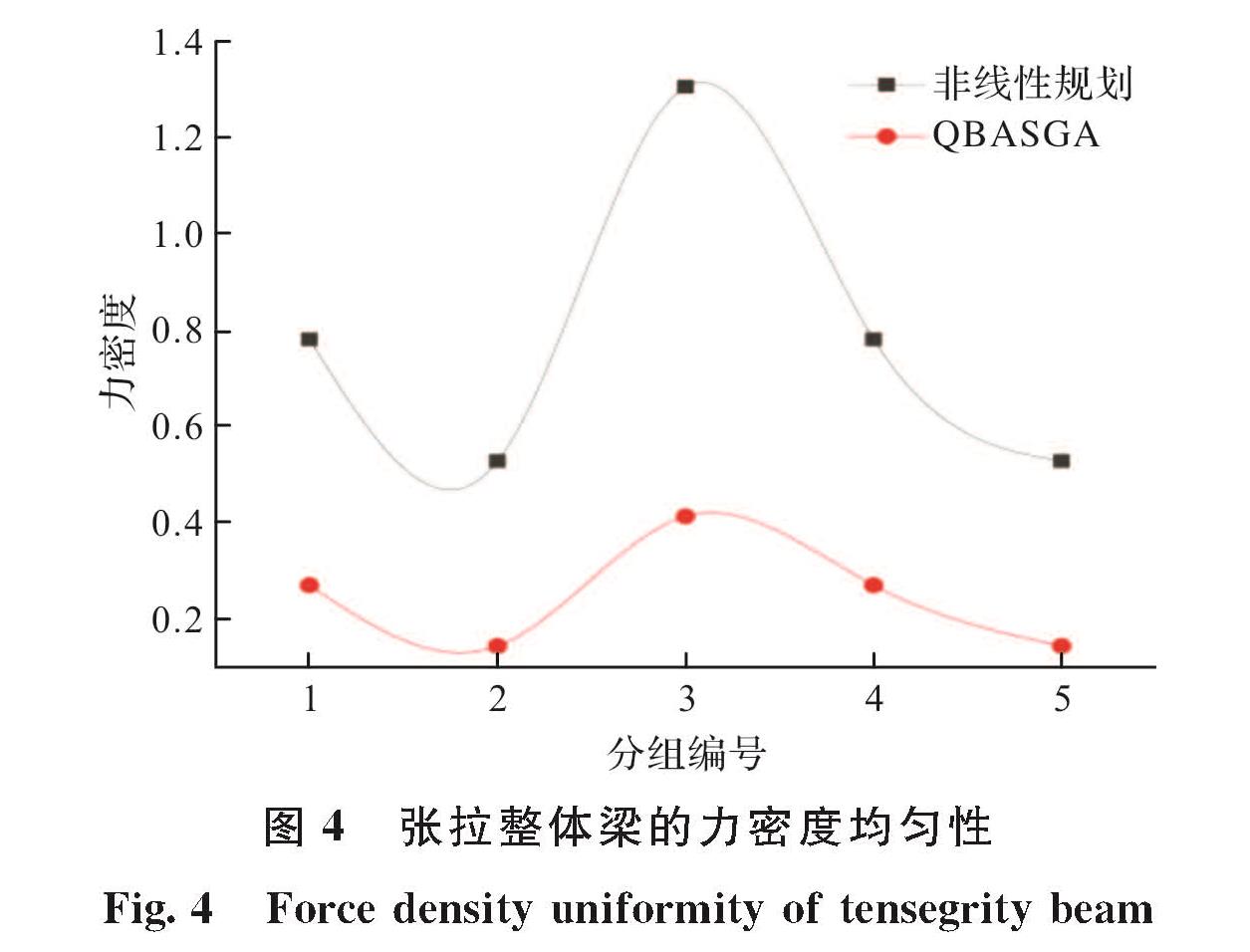
使用图4中曲线的起伏度表示力密度均匀度,显而易见的,使用量子天牛须搜索算法对目标函数优化的效果较文献[21]使用非线性规划法更好.
图4 张拉整体梁的力密度均匀性
Fig.4 Force density uniformity of tensegrity beam
但需要指出是,将力密度均匀性作为目标函数,是为了达到方便施工、节省施工成本为目标. 值得一提的是,文献[21]所使用的分组方法,须进行大量前置工作,即观察结构对称性,得到n种分组方案并筛选出非零解空间的可行方案,这个工作将会非常耗时. 而本文将通过编写计算构件范数值代码就可实现快速自动分组,无需再通过人为观察结构对称性.
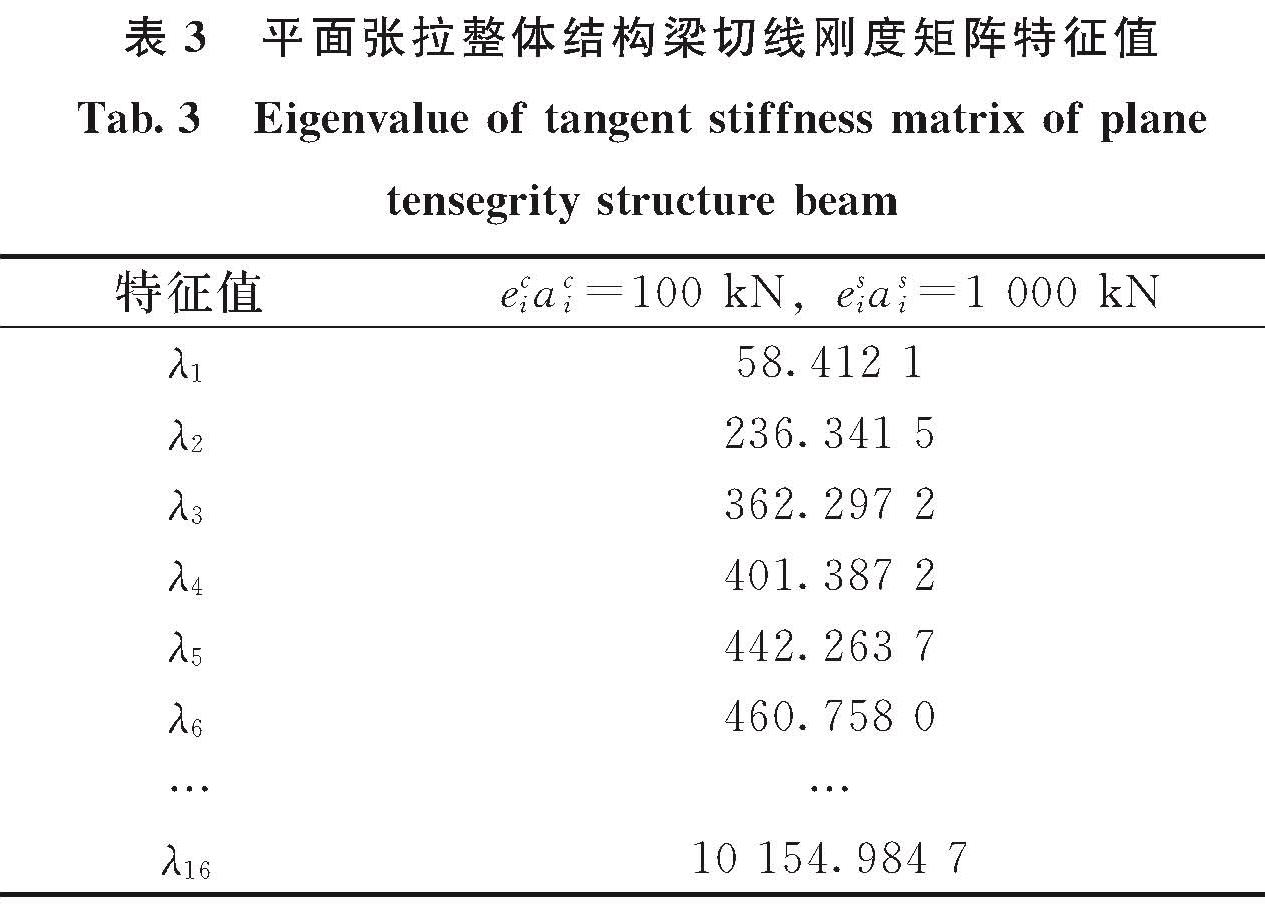
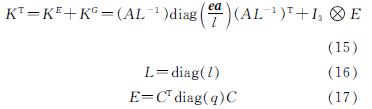
在上述初始预应力作用下,可根据式(15)考虑该结构的稳定性,其中切向刚度矩阵特征值满足式(19),说明结构处于稳定状态.
表3 平面张拉整体结构梁切线刚度矩阵特征值
Tab.3 Eigenvalue of tangent stiffness matrix of plane tensegrity structure beam
3.2 空间四向张拉整体结构网架
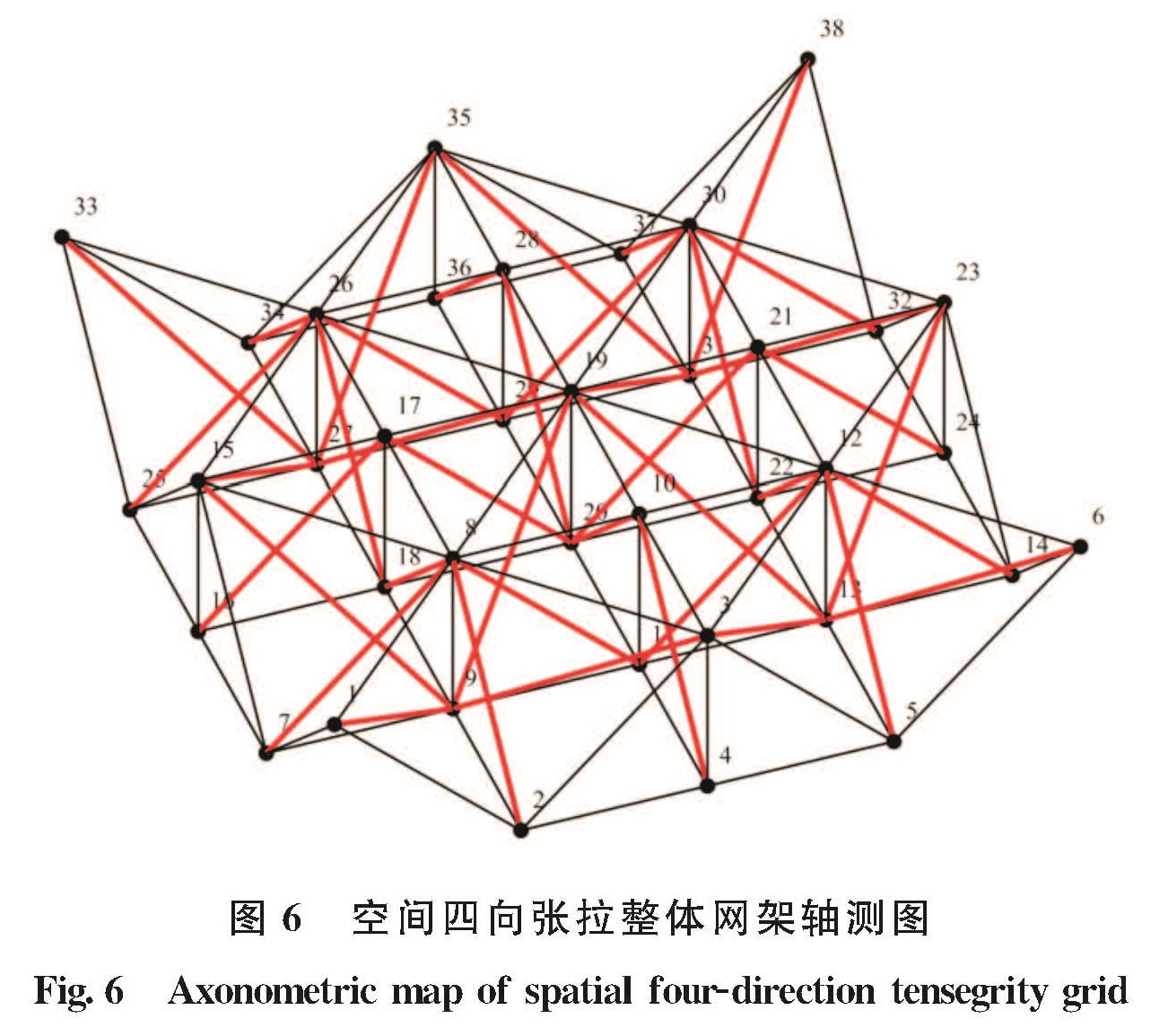
现有一个由38个节点、40根压杆、93根拉索组成的空间四向张拉整体网架结构,如图5、6所示.
图5 空间四向张拉整体网架俯视图
Fig.5 Top view of spatial four-way tensegrity grid
图6 空间四向张拉整体网架轴测图
Fig.6 Axonometric map of spatial four-direction tensegrity grid
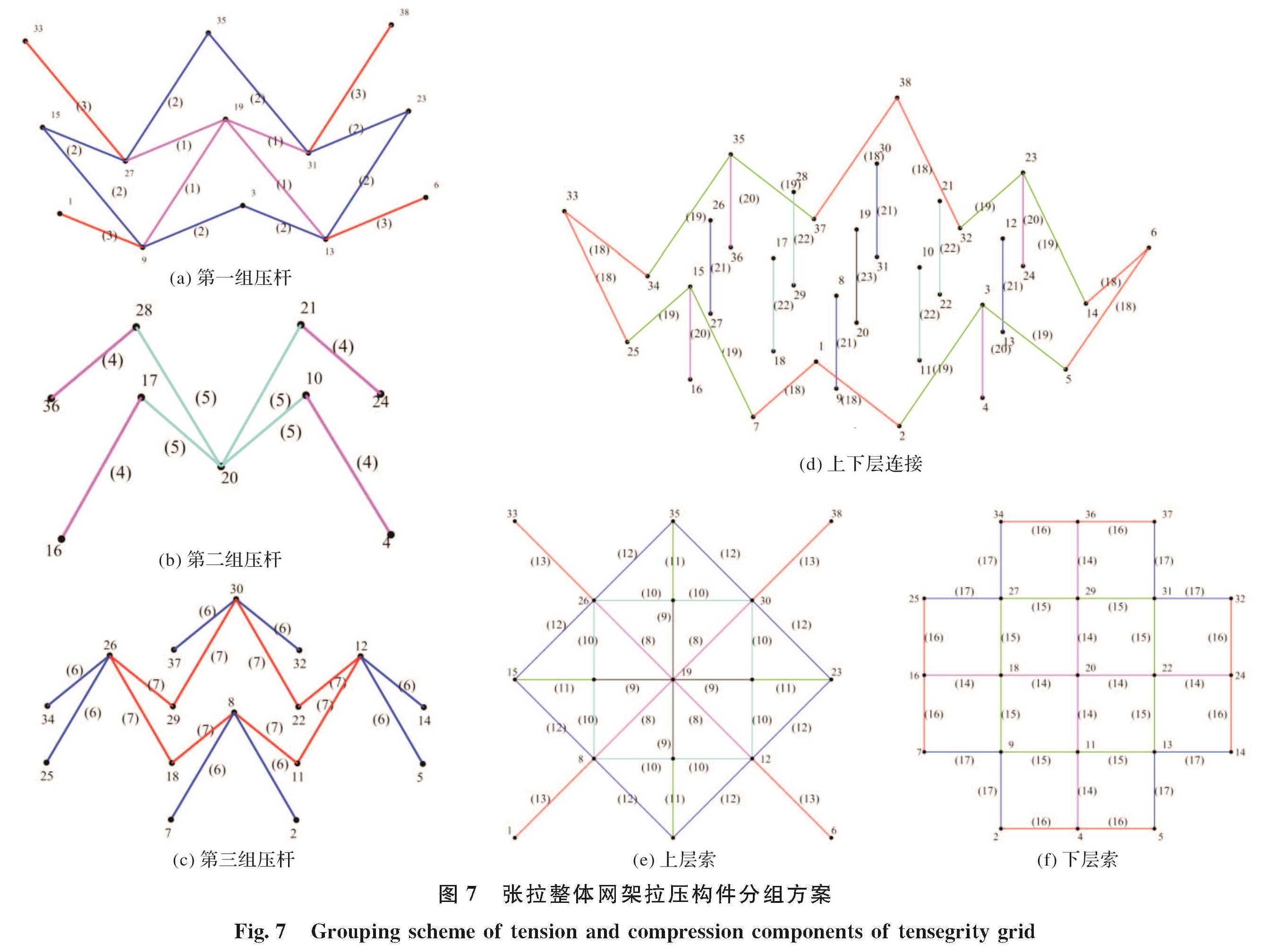
采用范数分组法:根据L2范数值表现出的对称性,将该结构划分为六大模块,在图7中同一类的压杆用数字标记,用不同的颜色用以区分组别:
1.中间的压杆划分为三组连续的压杆,命名为模块a、模块b、模块c.
模块a中第一组连续的压杆,从内向外分为第(1)、(2)、(3)组; 模块b中第二组连续的压杆,从内向外分为第(4)、(5)组; 模块c中第三组连续的压杆,从内向外分为第(6)、(7)组;
2.连接压杆上部端点的索而形成的一个索平面划分为上层索,命名为模块d.
模块d中连续的拉索,从内向外分为第(8)、(9)、(10)、(11)、(12)、(13)组;
3.连接压杆下部端点的索而形成的一个索平面划分为下层索,命名为模块e.
模块e中连续的拉索,从内向外分为第(14)、(15)、(16)、(17)组;
4.而位于网架中部用于拉住上、下两层的竖向索和位于网架四周的用于拉住上、下两层的斜向索,命名为模块f.
模块f中连续的拉索,从内向外分为第(18)、(19)、(20)、(21)、(22)、(23)组.
图7 张拉整体网架拉压构件分组方案
Fig.7 Grouping scheme of tension and compression components of tensegrity grid
经公式(5)可得s=25,采用L2范数分组法快速获得133根构件的分组方案,经公式(14)可得S^-=5,将网架的自应力模态从25降低至5,大大减少了求解变量的维度,再次证明采用L2范数分组方法的便捷性.
采用量子天牛须搜索算法:设置40个天牛个体组成的初始种群,每只天牛搜索的每一步步长长度为1,步长常数c=10,eta=0.95,每次迭代采用式(35)、(36)的量子旋转门进行种群更新,最大迭代次数为150次.经过如图1的算法流程,可以得到对应的收敛过程:算法运行2.508 s后目标函数在第95代收敛至最小值(图8).
图8 四向张拉整体网架目标函数的收敛过程
Fig.8 Convergence process of objective function of four-direction tensegrity grid
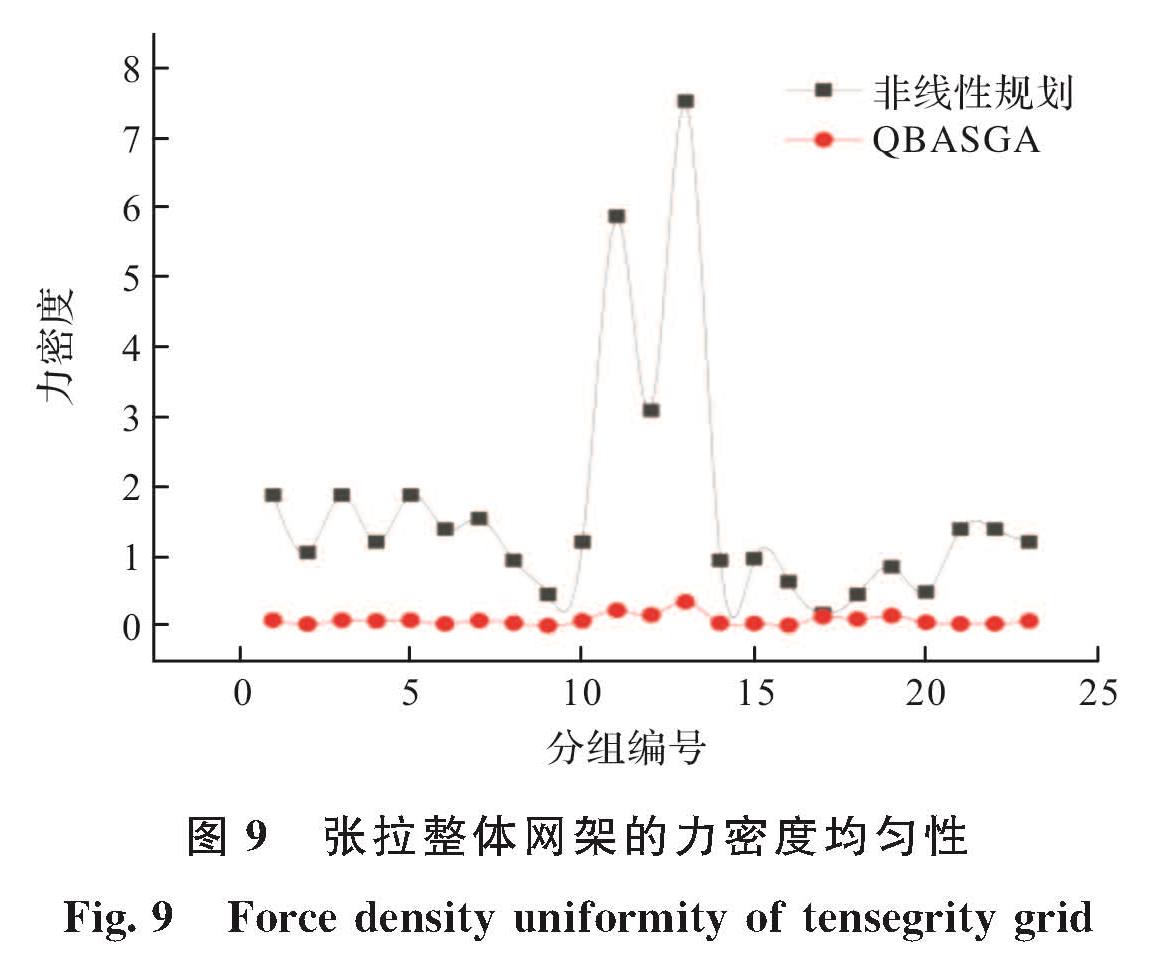
从图9可以看出,非线性规划算法有两个明显的尖峰,破坏了整体的力密度均匀性. 结果表明对于复杂的张拉整体网架结构,量子天牛须搜索算法对于目标函数的优化效果大大优于文献[21]所使用的非线性规划法.
图9 张拉整体网架的力密度均匀性
Fig.9 Force density uniformity of tensegrity grid
且结构总应变能更小,在张拉成形时,外部设备输入能量更少,达到方便施工、节省施工成本的目标.
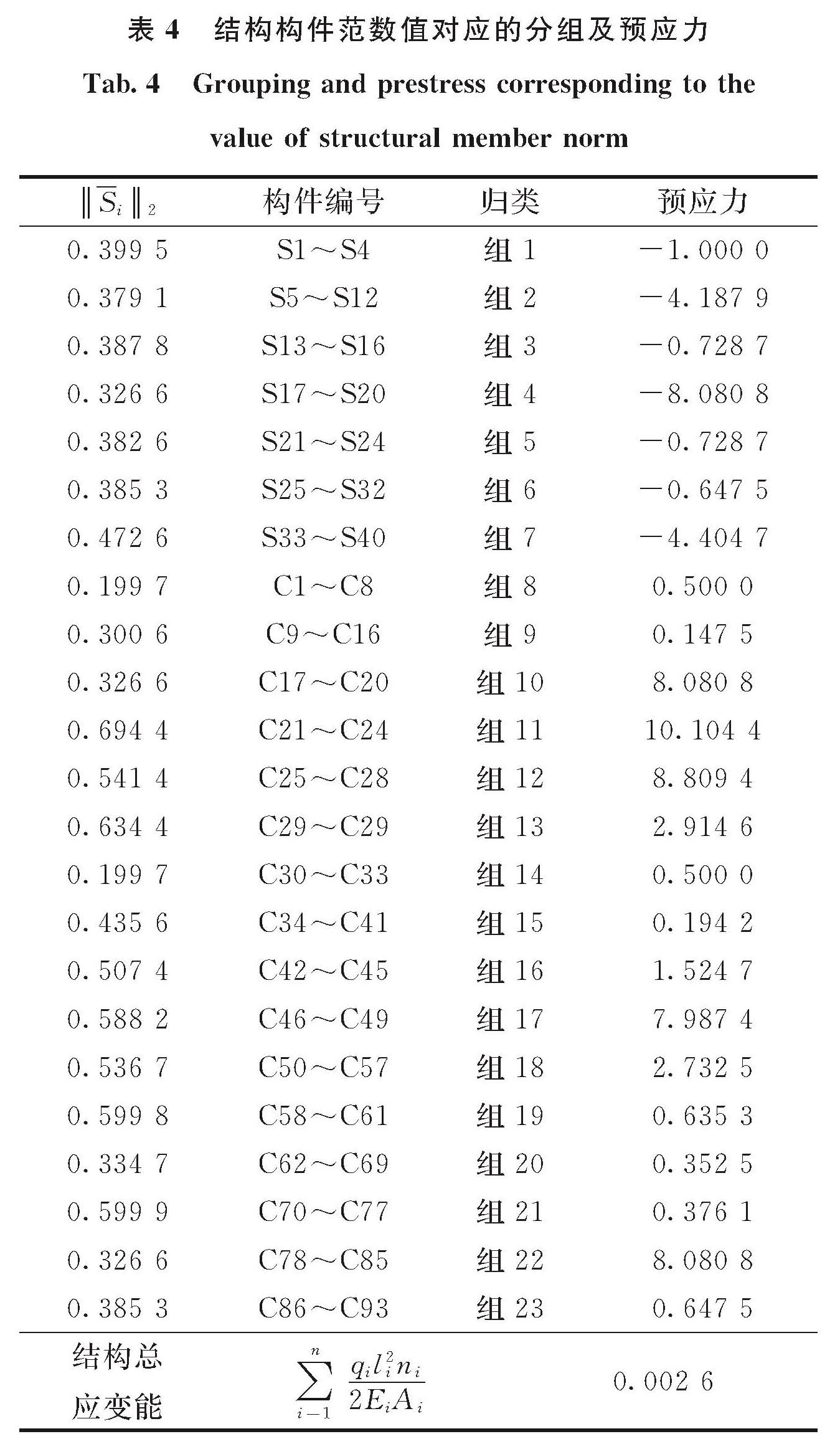
表4 结构构件范数值对应的分组及预应力
Tab.4 Grouping and prestress corresponding to the value of structural member norm
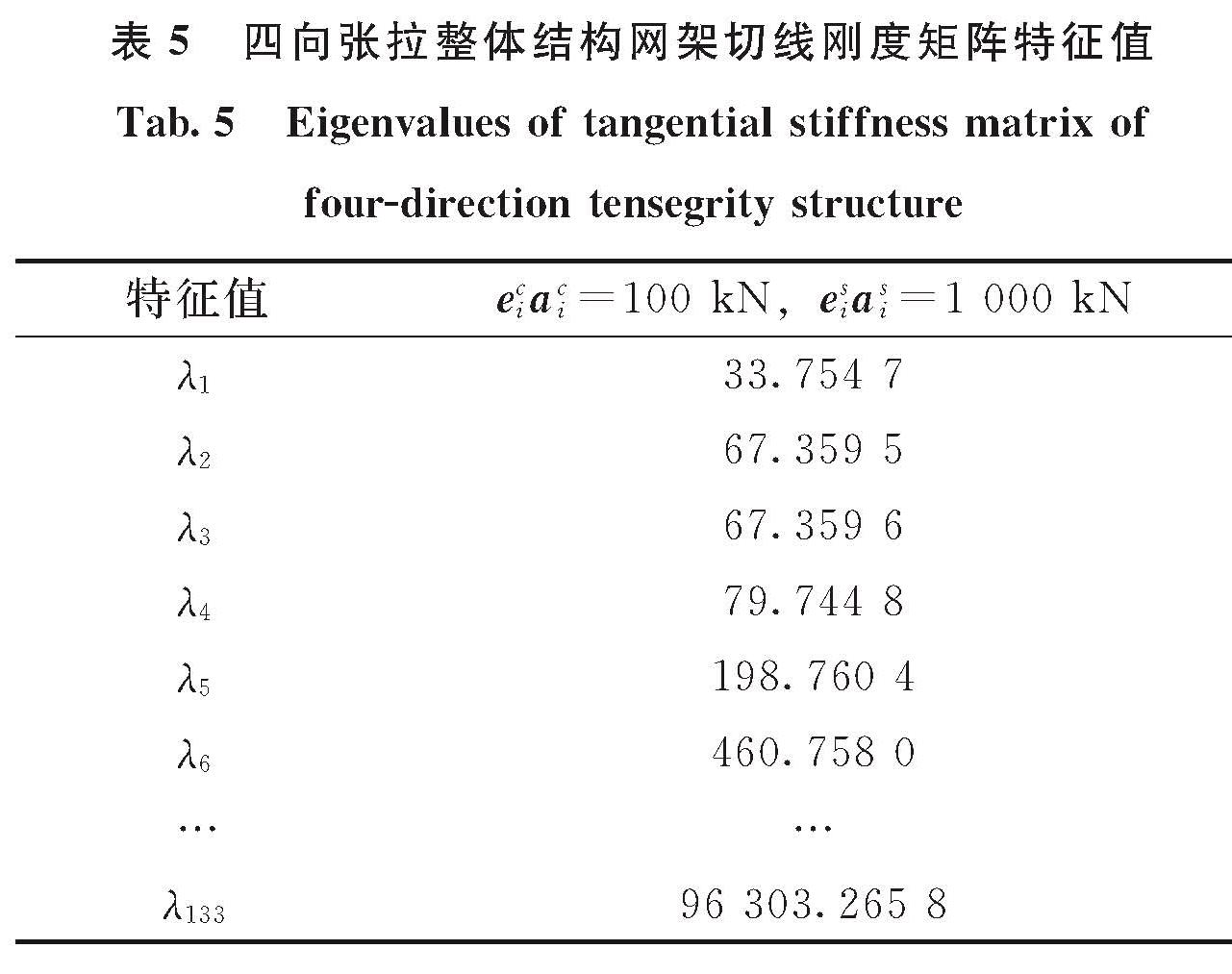
在表4所列的初始预应力作用下,可根据式(15)考虑该结构的稳定性,结果如表5所示,其中切向刚度矩阵特征值满足式(19),说明结构处于稳定状态. 且验算误差为k=1.451 7e13<10e-10,满足误差要求.
表5 四向张拉整体结构网架切线刚度矩阵特征值
Tab.5 Eigenvalues of tangential stiffness matrix of four-direction tensegrity structure



 为张量积.
为张量积.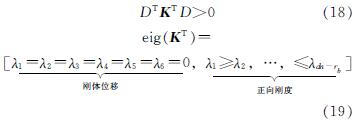

 为随机单位向量,并对其归一化操作表示为
为随机单位向量,并对其归一化操作表示为